3.9 交流伺服电动机的应用

交流伺服电动机在自动控制系统、自动检测系统和计算装置中主要作为执行元件。交流伺服电动机在自动控制系统中的应用实例很多,例如工业上发电厂闸门的开启,轧钢机中轧辊间隙的自动控制,军事上火炮和雷达的定位等。交流伺服电动机在检测装置中应用的例子很多,例如电子自动电位差计,电子自动平衡电桥。
在计算装置中,交流伺服电动机和其他控制元件一起组成各种计算装置,可以进行加、减、乘、除、乘方、开方、正弦函数、微分和积分等运算。
图3-13是交流伺服电动机在热电偶温度计的自动平衡电位计电路中的应用。在测量温度时,将开关合在b点,利用电位计电阻 R 2 段上的电压降来平衡热电偶的电动势。当两者不相等时,就产生不平衡电压(即差值电压)Δ U 。不平衡电压经变流器变换为交流电压,而后经电子放大器放大。放大器的输出端接交流伺服电动机的控制绕组。于是电动机便转动起来,从而带动电位计电阻的滑动触点。滑动触点的移动方向,正好是使电路平衡的方向。一旦达到平衡(Δ U =0),电动机便停止转动。这时电阻 R 2 上的电压降 R 2 I 0 恰好与热电动势 E t 相等。如果将 I 0 保持为标准值,则电阻 R 2 的大小就可反映出热电动势或直接反映出被测温度的大小。当被测温度高低发生变化时,Δ U 的极性不同,也就是控制电压的相位不同,从而使伺服电动机正转或反转再达到平衡。
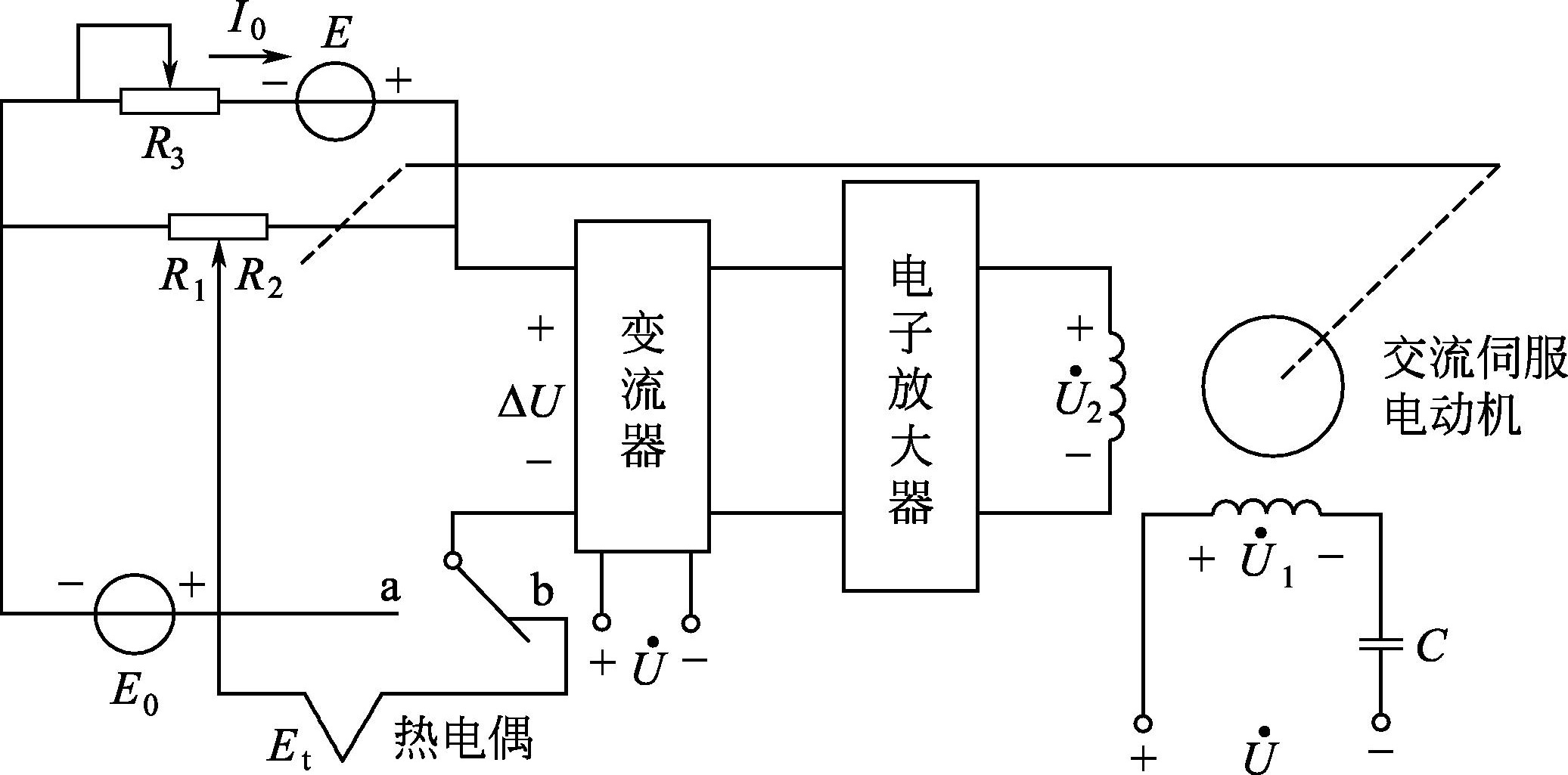
图3-13 自动平衡电位计电路的原理图
为了使电流 I 0 保持为恒定的标准值,在测量前或校验时,可将开关合在a点,将标准电池(其电动势为 E 0 )接入。而后调节 R 3 ,使( R 1 + R 2 ) I 0 = E 0 ,即使Δ U =0。这时的电流 I 0 即等于标准值。可变电阻器 R 3 的滑动触点也常用伺服电动机来带动,以自动满足( R 1 + R 2 ) I 0 = E 0 的要求。
同时,交流伺服电动机也带动温度计的指针和记录笔,在记录纸上记录温度数值;另有微型同步电动机以匀速带动记录纸前进(在图3-13上均未示出)。
上述的自动平衡电位计电路可用图3-14所示的闭环控制的方框图来表示。因为信号的传送途径是一闭合环路,故称为闭环。当输入端的温度发生变化时,产生不平衡信号Δ U ,将此信号经变流和放大后传送到输出端的交流伺服电动机,电动机通过电位计又使输入端平衡(Δ U =0)。这种将控制系统输出端的信号通过某种电路(反馈电路)引回到输入端的方式,称为反馈。若引回的信号(如图中的 R 2 I 0 )与输入端的信号(如图中的 E t )是相减的,使差值信号(如Δ U )减小,则称为负反馈。由于闭环控制总是通过反馈来实现,所以闭环控制系统也称为反馈控制系统。在图3-14中,因为 E t 和 R 2 I 0 都是电压,只要使它们连接的极性相反,就可得出差值电压Δ U ,所以不需要专门的比较元件。
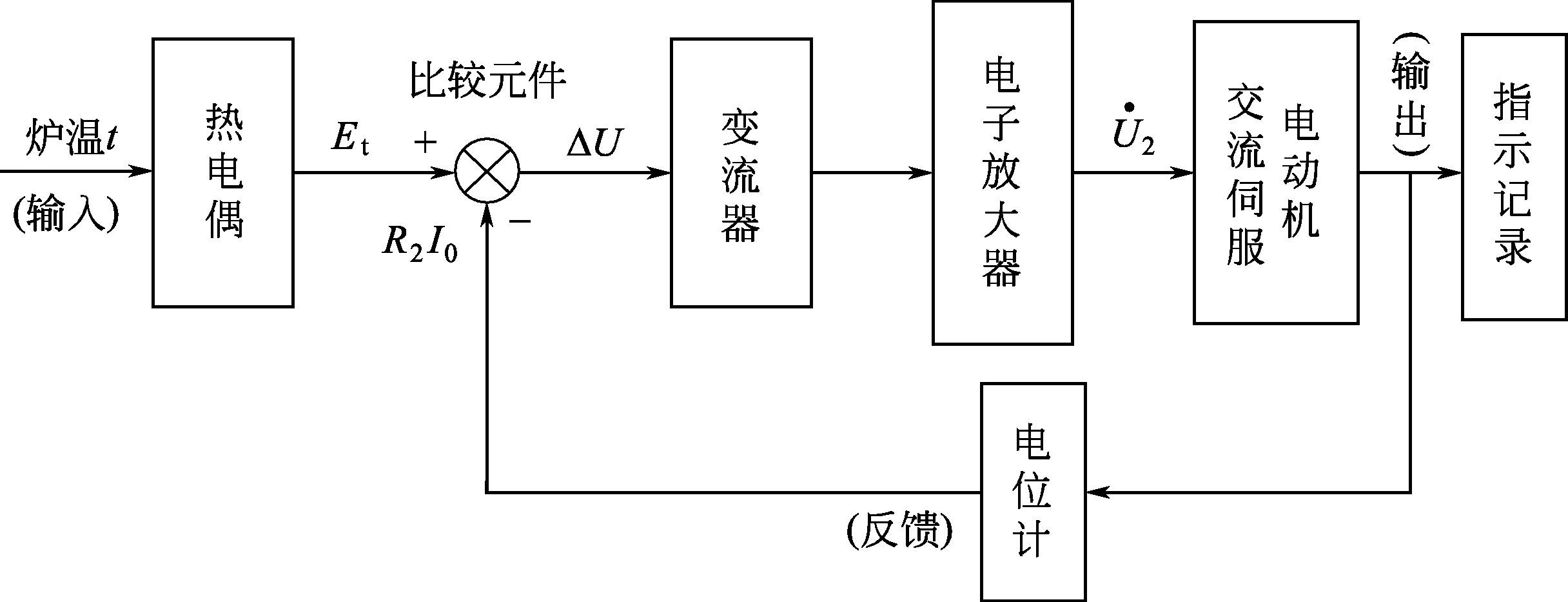
图3-14 自动平衡电位计电路的闭环控制方框图