4.7 直流测速发电机的应用

(1)转速闭环调速系统
测速发电机在转速闭环调速系统中作为测速元件是最主要的应用,通过对转速的检测,构成转速负反馈闭环调速系统,达到改善系统调速性能的目的。
转速闭环调速系统(又称转速自动调节系统)的原理图如图4-14所示。直流测速发电动机TG与直流电动机M同轴连接,直流测速发电机作为转速负反馈元件,其输出与被调量成正比的转速负反馈电压
U
n
,与转速给定电压
 相比较,得到转速偏差电压Δ
U
n
,经放大器A,产生电力电子变换器UPE所需的控制电压
U
c
,再得到大小和方向均可调节的电压
U
d
,用以控制直流电动机的转速,这就是转速负反馈的闭环直流调速系统。如果放大器改用比例积分(PI)调节器,则可以构成无静差调速系统。
相比较,得到转速偏差电压Δ
U
n
,经放大器A,产生电力电子变换器UPE所需的控制电压
U
c
,再得到大小和方向均可调节的电压
U
d
,用以控制直流电动机的转速,这就是转速负反馈的闭环直流调速系统。如果放大器改用比例积分(PI)调节器,则可以构成无静差调速系统。

图4-14 转速闭环调速系统
调节转速给定电压
,转速闭环调速系统可达到所要求的转速。若电动机的转速
n
由于某种原因(如负载转矩增大)减小,则此时测速发电机输出的反馈电压
U
n
减小,转速给定电压
和转速反馈电压
U
n
的差值增大,差值电压信号Δ
U
n
经放大器A放大后,使电动机的电压
U
d
增大,直流电动机开始加速,测速发电机输出的反馈电压
U
n
增加,差值电压信号Δ
U
n
减小,直到近似达到所要求的转速为止。
同理,若电动机的转速
n
由于某种原因(如负载转矩减小)增加,则测速发电机的输出反馈电压
U
n
增加,转速给定电压
和测速反馈电压
U
n
的差值减小,差值电压信号Δ
U
n
经放大器A放大后,使电动机的电压
U
d
减小,直流电动机开始减速,直到近似达到所要求的转速为止。
通过以上分析可以了解到,只要系统转速给定电压不变,无论由于何种原因企图改变电动机的转速,由于测速发电机输出电压反馈的作用,系统能自动调节到所要求的转速(有一定的误差,近似于恒速)。
(2)位置伺服控制系统的速度阻尼及校正
位置伺服控制系统又称随动控制系统,图4-15所示为模拟式随动系统原理图。在直流伺服电动机的轴上耦合一台直流测速发电机,测速发电机也作转速反馈元件,但其作用却不同于转速自动调节系统。它使得由伺服电动机及其负载的惯性所造成的振荡受到了阻尼,起速度阻尼作用,因此可改善系统的动态性能。
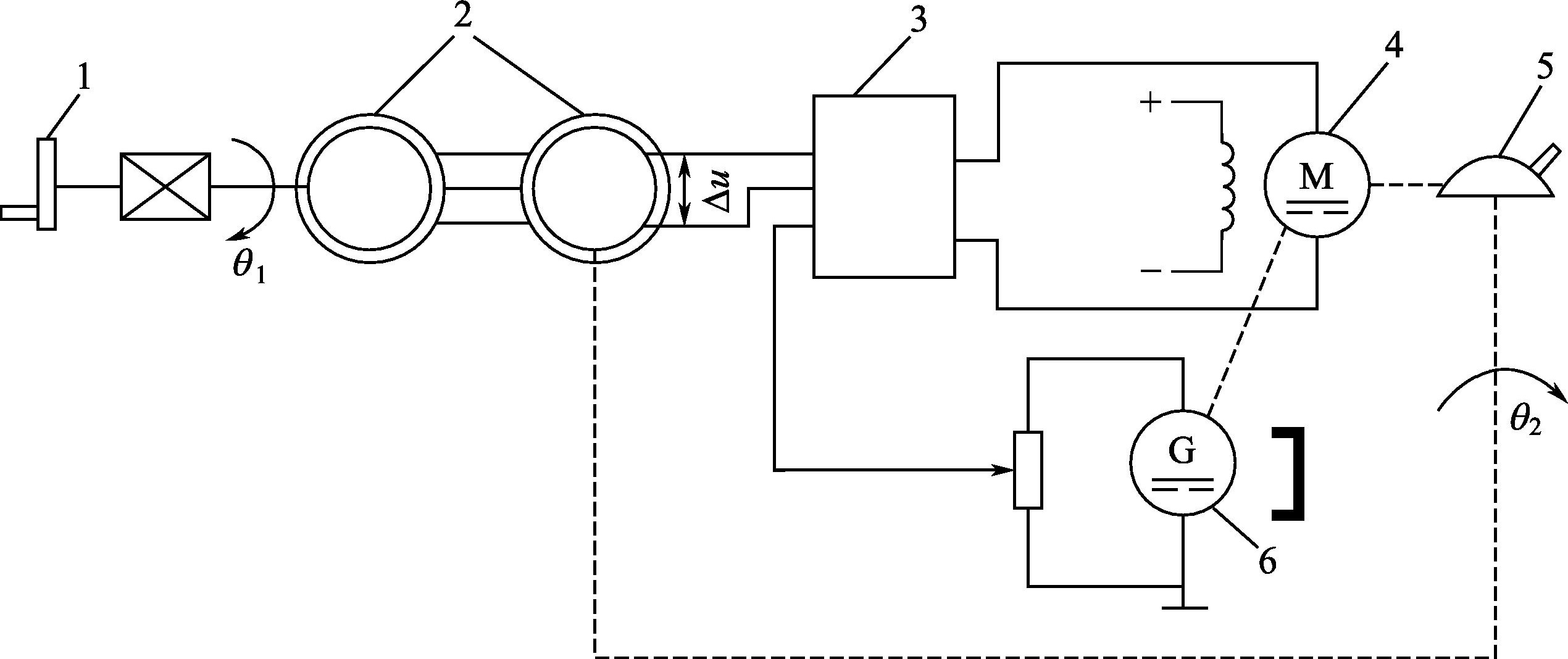
图4-15 模拟式随动系统原理图
1—手轮;2—自整角机;3—放大器;4—直流伺服电动机;5—控制对象(火炮);6—直流测速发电机
在不接直流测速发电机时,假如火炮手向某一方向摇动手轮,使自整角发送机和自整角接收机的转角不相等,设 θ 1 > θ 2 ,产生失调角 θ ( θ = θ 1 - θ 2 ),则自整角接收机输出一个与失调角 θ 成正比的电压 U = K 1 θ ( K 1 为比例系数),经放大器放大,加到直流伺服电动机上。电动机带动火炮一起转动,此时自整角接收机也跟着一起转动,使 θ 2 增加, θ 值减小。当 θ 1 = θ 2 时,虽然 θ =0°, U =0,但由于电动机和负载的惯性,当转到 θ 1 - θ 2 =0°的位置时,其转速不为零,继续向 θ 2 增加的方向转动,使 θ 2 > θ 1 , θ <0°,自整角接收机输出电压的极性变反。在此电压的作用下,电动机由正转变为反转。同理,反转时 θ 过0°后伺服电动机又由反转变为正转,这样系统就产生了振荡。
如果接上直流测速发电机,它输出一个与转速成正比的直流电压
 ,并负反馈到放大器的输入端。当
θ
1
=
θ
2
时,由于
,并负反馈到放大器的输入端。当
θ
1
=
θ
2
时,由于
 ,测速发电机仍有电压输出,使放大器的输出电压极性与原来(
θ
1
>
θ
2
时)的相反,此电压使直流伺服电动机制动,因而直流伺服电动机就很快地停留在
θ
1
=
θ
2
的位置。可见,由于系统中加入了直流测速发电机,就使得由直流伺服电动机及其负载的惯性所造成的振荡受到了阻尼,从而改善了系统的动态性能。
,测速发电机仍有电压输出,使放大器的输出电压极性与原来(
θ
1
>
θ
2
时)的相反,此电压使直流伺服电动机制动,因而直流伺服电动机就很快地停留在
θ
1
=
θ
2
的位置。可见,由于系统中加入了直流测速发电机,就使得由直流伺服电动机及其负载的惯性所造成的振荡受到了阻尼,从而改善了系统的动态性能。