5.2 交流测速发电机的基本结构与工作原理

5.2.1 同步测速发电机的基本结构与工作原理
(1)永磁式交流测速发电机
永磁式交流测速发电机实质上就是一台单相永磁同步发电机,转子由永磁体构成,定子绕组感应的交变电动势的大小和频率都随输入信号(转速)而变化。由于感应电动势的频率随转速而改变,致使发电机本身的阻抗和负载阻抗均随转速而变化,所以这种测速发电机的输出电压不再和转速成正比关系。因此,尽管它结构简单,也没有滑动接触,但是仍不适用于自动控制系统,通常只作为指示式转速计。
(2)感应子式测速发电机
感应子式测速发电机的原理结构如图5-1所示。其定、转子铁芯均由硅钢片冲制叠成,在定子内圆周和转子外圆周上都有均匀分布的齿槽。在定子槽中放置节距为一个齿距的输出绕组,通常组成三相绕组。定、转子的齿数应符合一定的配合关系。

图5-1 感应子式测速发电机的原理结构图
当转子不转时,由永久磁铁在发电机气隙中产生的磁通是不变的,所以定子输出绕组中没有感应电动势。但是,当转子以一定的速度旋转时,由于定、转子齿之间的相对位置发生了周期性的变化,则定子齿上的输出绕组所匝链的磁通大小也相应地发生了周期性的变化。于是输出绕组中就产生了交变的感应电动势。每当转子转过一个齿距,输出绕组中的感应电动势也就变化一个周期。因此输出电动势的频率(Hz)为

式中 z r ——转子的齿数;
n ——发电机的转速,r/min。
由于感应子式测速发电机的感应电动势频率和转速之间有严格的关系,所以属于同步发电机。相应地,感应电动势的大小也和转速成正比,故可以作为测速发电机用。但是,它也和永磁式同步测速发电机一样,由于电动势的频率随转速而变化,致使负载阻抗和发电机本身的内阻抗大小均随转速而变化,所以也不宜用于自动控制系统中,通常只作为指示式转速计。将感应子式测速发电机输出电压经整流后亦可作直流测速发电机使用。
(3)脉冲式测速发电机
脉冲式测速发电机和感应子式测速发电机的工作原理基本相同,都是利用定、转子齿槽相互位置的变化,使输出绕组所匝链的磁通发生脉动,从而感应出电动势。
脉冲式测速发电机是以脉冲频率作为输出信号的。由于输出电压的脉冲频率和转速保持严格的比例关系,所以也属于同步发电机类型。其特点是输出信号的频率相当高,即使在较低的转速(如每分钟几转或几十转)下,也能输出较多的脉冲数,因而以脉冲个数显示的速度分辨率就比较高,适用于速度比较低的调节系统,特别适用于鉴频锁相的速度控制系统。
5.2.2 异步测速发电机的基本结构与工作原理
(1)异步测速发电机的类型与特点
异步测速发电机(又称感应测速发电机)按其结构可分为笼型转子和空心杯形转子两种。
笼型转子异步测速发电机的结构与笼型转子两相伺服电动机的结构相似,它的输出特性的斜率大,但线性误差大,相位误差大,剩余电压高,一般用在对精度要求不高的系统中。
空心杯形转子异步测速发电机的结构与空心杯形转子伺服电动机的结构相似。不同的是,为了减小误差,使输出特性的线性度较好,性能稳定,测速发电机的空心杯形转子多采用电阻率较高和温度系数较低的材料制成,如磷青铜、锡锌青铜、硅锰青铜等。
空心杯形转子异步测速发电机输出特性的精度比笼型转子异步测速发电机要高得多,而且空心杯形转子的转动惯量小,有利于控制系统的动态品质。所以,目前在自动控制系统中广泛应用的是空心杯形转子异步测速发电机。
(2)空心杯形转子异步测速发电机基本结构与工作原理
空心杯形转子异步测速发电机的工作原理如图5-2所示。定子的两相绕组应在空间位置上严格保持90°电角度。其中的一相绕组作为励磁绕组W
f
,外施稳频稳压的交流电源励磁;另一相绕组作为输出绕组W
2
,其两端的电压即为测速发电机的输出电压
 。
。
当频率为
f
的励磁电压
 加在励磁绕组W
f
上以后,在测速发电机内、外定子之间的气隙中,就会产生一个频率为
f
的脉振磁通
加在励磁绕组W
f
上以后,在测速发电机内、外定子之间的气隙中,就会产生一个频率为
f
的脉振磁通
 ,在空间按正弦规律分布,其幅值与励磁绕组W
f
的轴线重合,故称为直轴磁通。空心杯形转子可以看成是由无数根导体所组成的闭合笼型线圈。
,在空间按正弦规律分布,其幅值与励磁绕组W
f
的轴线重合,故称为直轴磁通。空心杯形转子可以看成是由无数根导体所组成的闭合笼型线圈。
当转子静止不动时,由励磁绕组产生的直轴脉振磁通
虽然能在转子中产生出变压器电动势(通过变压器作用而产生的电动势)
 ,如图5-2(a)所示,
使转子中有电流
,如图5-2(a)所示,
使转子中有电流
 流过,但由于转子电阻远大于电抗,故
将与
同相位,因此
所产生的磁场仍沿直轴方向。因为直轴方向的磁场与输出绕组W
2
的轴线相互垂直。所以,不会在输出绕组W
2
中感应电动势,故输出电压
流过,但由于转子电阻远大于电抗,故
将与
同相位,因此
所产生的磁场仍沿直轴方向。因为直轴方向的磁场与输出绕组W
2
的轴线相互垂直。所以,不会在输出绕组W
2
中感应电动势,故输出电压
 为零,如图5-2(a)所示。
为零,如图5-2(a)所示。
当转子以某一转速
n
旋转时,转子杯中除了上述变压器电动势外,由于空心杯形转子要切割磁通
,会产生第二个电动势,即所谓的速率电动势(又称运动电动势、切割电动势或旋转电动势)
 ,如图5-2(b)所示。由于磁通
为脉振磁通,所以电动势
亦为交变电动势,其交变的频率为磁通
的脉振频率
f
。它的大小为
,如图5-2(b)所示。由于磁通
为脉振磁通,所以电动势
亦为交变电动势,其交变的频率为磁通
的脉振频率
f
。它的大小为
E r = C 2 n Φ d
式中, C 2 为电动势比例常数。

图5-2 空心杯形转子异步测速发电机的工作原理
若磁通
的幅值恒定,则电动势
与转子的转速
n
成正比关系。
由于转子杯为短路绕组,所以在
的作用下,转子中有第二个电流
 流过。电流
也是频率为
f
的交流电,其大小正比于电动势
。同样,由于转子电阻远大于电抗,
将与
同相位。即在任一瞬间,转子中的电流方向与电动势方向一致。
流过。电流
也是频率为
f
的交流电,其大小正比于电动势
。同样,由于转子电阻远大于电抗,
将与
同相位。即在任一瞬间,转子中的电流方向与电动势方向一致。
当然,转子中的电流
也要产生脉振磁通
 ,其脉振频率仍为
f
,而大小正比于电流
,即
,其脉振频率仍为
f
,而大小正比于电流
,即
Φ q ∝ I r ∝ E r ∝ n
无论转速如何,由于转子杯上半周导体的电流方向与下半周导体的电流方向总相反,而转子导条沿着圆周又是均匀分布的,因此,
 产生的脉振磁通
产生的脉振磁通
 在空间的位置是固定的,磁通
的方向与励磁绕组W
f
的轴线正交,故称为交轴磁通。同理,磁通
与输出绕组W
2
的轴线一致,这个脉振磁通
将在输出绕组W
2
中感应出频率为
f
的电动势
在空间的位置是固定的,磁通
的方向与励磁绕组W
f
的轴线正交,故称为交轴磁通。同理,磁通
与输出绕组W
2
的轴线一致,这个脉振磁通
将在输出绕组W
2
中感应出频率为
f
的电动势
 ,从而产生测速发动机的输出电压
,从而产生测速发动机的输出电压
 ,它的大小正比于
,即
,它的大小正比于
,即
U 2 ∝ E 2 ∝ Φ q ∝ n
在上述的物理过程中,由于
 的大小和频率恒定,则直轴磁通
的大小和频率恒定,则直轴磁通
 的脉振频率和振幅不变,随之
的脉振频率和振幅不变,随之
 和
的频率不变而其大小与转子转速
n
成正比。由此可见,由
感应于输出绕组中的电动势
具有这样的特点:电动势
的频率永远与
的频率相同而保持不变。但电动势
的大小则与转子的转速
n
成正比。因此,输出电压
的频率和电源频率
f
相同,与转速
n
的大小无关,而输出电压
的大小与转速
n
成正比。当转子的转向改变时,输出电压的相位也跟着改变180°。这就是空心杯形转子异步测速电动机的基本工作原理。
和
的频率不变而其大小与转子转速
n
成正比。由此可见,由
感应于输出绕组中的电动势
具有这样的特点:电动势
的频率永远与
的频率相同而保持不变。但电动势
的大小则与转子的转速
n
成正比。因此,输出电压
的频率和电源频率
f
相同,与转速
n
的大小无关,而输出电压
的大小与转速
n
成正比。当转子的转向改变时,输出电压的相位也跟着改变180°。这就是空心杯形转子异步测速电动机的基本工作原理。
5.2.3 交流伺服测速机组
交流伺服电动机和交流测速发动机通常是通过齿轮组耦合在一起的。由于齿轮之间不可避免地有间隙存在,就会影响运转的稳定性和精确性。特别是在低速运转时,会使伺服系统发生抖动现象。齿轮间隙对于系统来说,是一种不可避免的非线性因素。
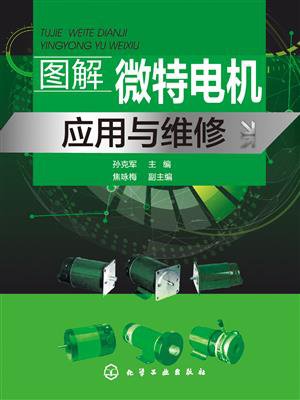
为了克服齿轮间隙的影响,可以把伺服电动机与测速发动机做成一体,采用公共的转轴和外壳,这就是交流伺服测速机组。交流伺服测速机组的结构有以下两种类型。
一种交流伺服测速机组是由笼型转子两相伺服电动机和空心杯转子异步测速发电机组合成一体,省掉了齿轮或其他联轴器,其结构如图5-3(a)所示。显然这样的机组不但消除了齿隙误差,而且还具有结构紧凑、体积小、重量轻、电机传动精度高等优点,适用于自动控制系统中作速度反馈执行元件。
另一种交流伺服测速机组的结构特点是伺服电动机和测速发动机的转子都是采用杯形转子,它们共用一个杯形转子和内定子,其结构如图5-3(b)所示。这种机组体积小、重量轻、惯性小、运行平稳、反应速度灵敏,适用于一些高精度的伺服系统中,特别适用于航空仪表装置中。
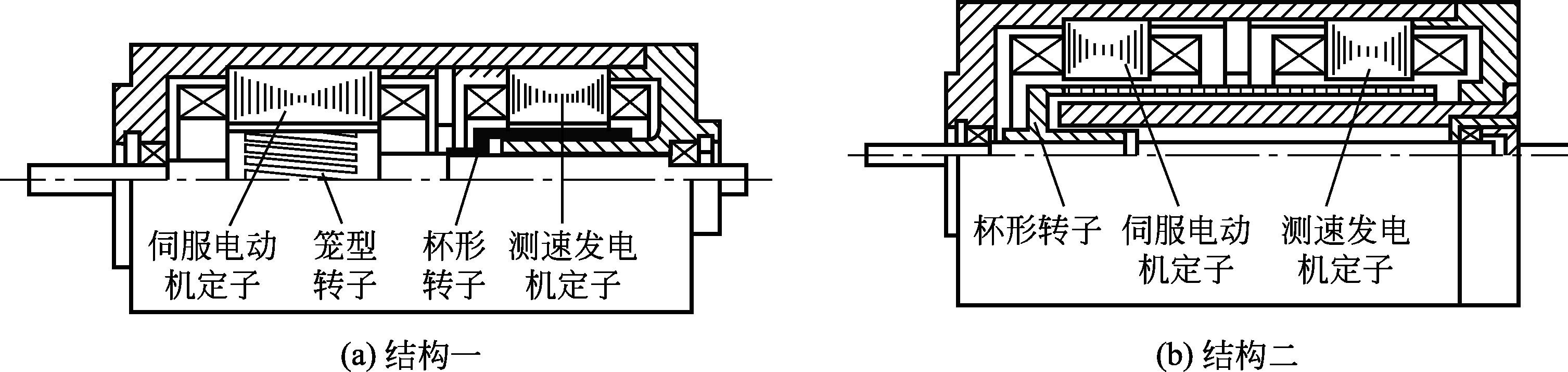
图5-3 交流伺服测速机组