3.2 电子制动系统动力学理论基础
车辆制动是依靠地面对车轮的反作用力来实现的,在制动过程中伴随着各种形式的力和力矩的传递。研究车辆制动过程中的系统动力学原理,是为了更合理地设计制动系统、优化制动效能及对ABS/ESP系统进行匹配开发。
车辆制动性能的评价指标主要有以下几项:
(1)制动效能 制动效能指汽车在良好的路面上以一定初速度和规定的制动踏板力开始制动,在最短的时间内停车的一种能力,是制动性能的基本的评价指标。一般用制动距离、制动减速度等表示。
(2)制动效能的恒定性 制动效能的恒定性指抗热衰退性能和抗水衰退性能,主要指抗热衰退性能。即汽车匀速行驶制动或下长坡制动时随制动器温度升高而保持摩擦力矩的能力。抗水衰退性能指汽车涉水后对制动效能的保持能力。
(3)制动时汽车的方向稳定性 制动时汽车的方向稳定性指汽车在制动过程中不发生跑偏、侧滑或丧失转向功能,按驾驶人给定方向行驶的能力。
(4)制动舒适性 制动舒适性指车辆在制动过程中制动的轻便性、制动噪声及乘坐舒适性等。
3.2.1 制动力分配与制动稳定性
制动系统设计的目标是在制动过程中汽车制动距离要短、不发生侧滑和甩尾,并且保持转向性能。一般情况下,制动时可能发生以下三种情况:
1)前轮先于后轮抱死拖滑。此时车辆离心力和侧滑方向相反,车辆处于稳定状态,但车辆失去转向能力。
2)后轮先于前轮抱死拖滑。此时车辆离心力和侧滑方向相同,后轴发生侧滑,车辆处于不稳定状态。
3)前、后轮同时抱死。此时可以避免后轴侧滑,前转向轮只有在最大制动强度下才失去转向性,路面面附着系数利用率相对较高。
制动过程中,在保证车辆稳定性的同时又要充分利用路面附着系数,从而得到较短的制动距离,理想情况是防止任何车轮抱死,前、后轮均处于滚动到抱死的临界状态,从而使每个车轮均充分利用轮胎与路面的附着力。前、后制动器制动力的分配比例,将影响制动时前、后轮的抱死顺序,从而影响汽车制动时的方向稳定性和附着条件利用程度。为了实现这一目的,需要在设计车辆制动系统时合理分配前后轴荷。
图3-3所示为不同路面附着系数及载荷下的制动力分配曲线(图中 F Z 1 为前轮制动器制动力, F Z 2 为后轮制动器制动力, G 为车辆重力, Z 为前轮制动器制动力与汽车总制动器制动力之比)。当前、后轮制动器制动力之比为固定值时,前轮制动器制动力与汽车总制动器制动力之比称为制动器制动力分配系数,在制动力分配曲线上表现为一条线性直线。具有固定制动器制动力比值的汽车,使前、后车轮同时抱死的路面附着系数称为同步附着系数。由图3-3中可以看出,同步附着系数是理想制动力曲线和具有固定比值的制动力曲线交点处对应的附着系数。同步附着系数说明了前、后轮制动力分配为固定比值的汽车,只有在一种附着系数,即同步附着系数的路面上制动时,才能前、后轮同时抱死。
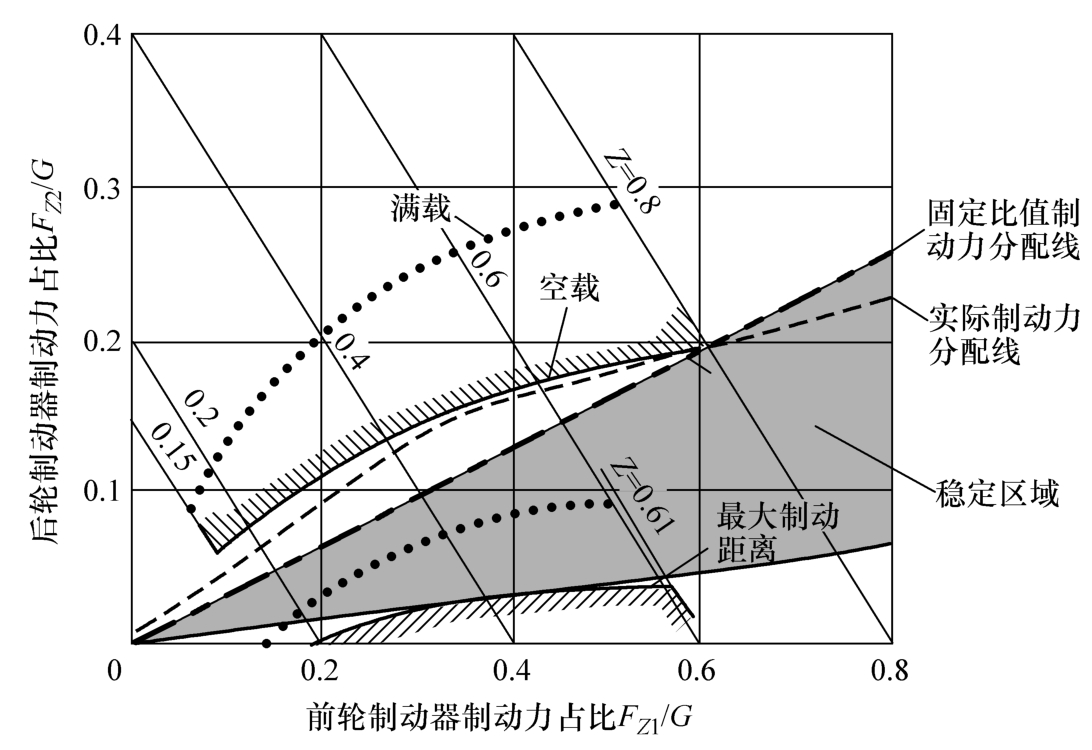
图3-3 不同路面附着系数及载荷下的制动力分配曲线
对于前、后轮制动器制动力为固定比值的车辆,无法保证在各种附着系数的路面上前、后轮同时抱死,但是为了保证制动时车辆的稳定性,避免后轮先于前轮抱死拖滑出现车辆甩尾,需要车辆制动力分配曲线在理想制动力分配曲线下方。从理想制动力分配曲线图可以看出,为了保证高附着系数(如附着系数 μ =0.8)路面上制动时的稳定性,需要制动器制动力分配曲线的斜率要小,在这种情况下,后轮分配到的制动力较小,制动效率低,没有充分利用路面附着系数,从而使制动距离加长,前轮在低附着系数路面上可能因抱死而失去转向能力,后轮在高附着系数时也可能先抱死发生侧滑和甩尾。所以,对于前、后轮制动器制动力为固定比值的车辆,在制动时的稳定性和减小制动距离是相互制约的。为了解决这一对相互制约的问题,需要车辆实际制动力分配曲线如图3-3中虚线所示,是一个变斜率并且接近理想制动力分配曲线下方的曲线。
在防抱死制动系统(ABS)和电子制动力分配(EBD)应用之前,车辆需要装配比例阀等机械制动力分配装置来调节前、后轮制动器制动力的合理分配,但这种机械式制动力分配装置受机械结构形式的限制,往往会把后轮制动力设定得过低,没有充分地利用后轮制动附着力,而且成本较高。而基于ABS硬件的扩展功能EBD,可以使前、后轮制动力分配曲线无限接近于理想制动力分配曲线,充分利用后轮路面附着系数,不会发生后轮先抱死拖滑而出现甩尾的不稳定制动工况,其成本相对于装配比例阀也有明显优势。
3.2.2 制动滑移率和驱动滑转率
在制动过程中,车轮抱死滑移的根本原因是制动器制动力大于轮胎与路面附着力。滑移率是车轮接地处的滑动速度与车轮中心运动速度的比值,即

式中 λ ——车轮滑移率;
v ——参考车速;
r ——车轮的动态滚动半径;
ω ——轮胎角速度。
当车轮纯滚动时, v = ωr ,滑移率 λ =0;当车轮纯滑动时, ω =0,滑移率 λ =1,此时车轮处于抱死状态。所以车轮的滑移率 λ 的值介于0和1之间,即0< λ <1。
制动力系数 μ b 定义为地面制动力 F b 与作用在车轮上的垂向动载荷 F Z 的比值,即 μ b = F b / F Z 。受轮胎和路面附着系数的限制,直线制动时车辆所能达到的最大减速度和最短制动距离依赖于制动力系数,车辆在不同特征的路面上制动时,在接近附着极限并且还处于滚动状态时,车辆仍然具有转向性能并处于稳定状态,制动效能还随动踏板力成正比例增加,此后车辆开始变得不稳定,如果制动压力不减小,车轮将很快抱死,车辆失去转向能力并发生侧滑或者甩尾。
图3-4所示为经过试验测量的车辆在典型特征路面上制动时制动力系数 μ b 随滑移率 λ 变化的曲线(图中, α 为侧偏角, μ b 为纵向附着系数, μ s 为侧向附着系数),当滑移率在15%~30%范围内时,车辆的制动力系数达到峰值水平,在该范围内制动时车辆的制动效能可以得到最大程度的发挥,车辆的转向性能和可操控性能可以得到保证,车辆处于安全状态。当车辆紧急制动时,要使车轮的滑移率始终处于这个范围,仅靠驾驶人的操作经验是远远不够的,而ABS控制器的制动力调节可帮助驾驶人在不依靠经验的条件下,使车轮与地面的滑移率始终处于峰值制动力系数范围,最大限度地利用车轮与地面的物理极限,从而缩短制动距离,同时避免车轮抱死拖滑导致车辆失稳。
由图3-4可知,弯道制动时车辆所能达到的最大制动距离和制动减速度除了受纵向制动力系数影响外,还受到轮胎侧向力传递能力和侧向力系数的影响,侧向力因轮胎变形产生,侧向力系数 μ s 被定义为侧向力 F s 与车轮垂向动载荷 F Z 之比,即 μ s = F s / F Z ,其大小受轮胎侧偏角的影响,侧偏角 α 定义为车轮接地中心的运动方向与车轮纵向滚动方向的夹角。
侧偏角 α =10°时的滑移率控制范围比侧偏角 α =2°时的大,也就是说,当车辆在弯道制动时,ABS应当更早地介入,如侧偏角 α =10°时,当车轮滑移率 λ =0.1时,制动力系数 μ b =0.35,此时侧向力系数 μ s 达到最大值( μ s =0.8)。
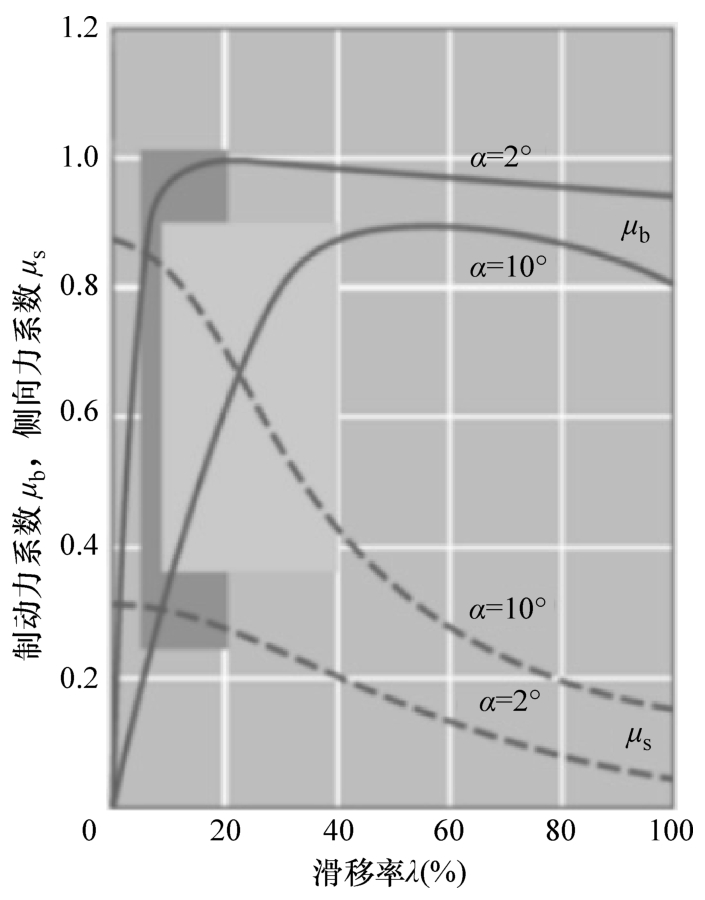
图3-4 制动力系数和侧向力系数与滑移率和侧偏角 α 的关系曲线
TCS研究车轮加速和打滑工况,其控制目标是驱动过程中的车轮滑转率 λ T ,滑转率定义为轮速和车速间差值与车速的比值,即

车辆行驶过程中,无论是制动力还是驱动力,均受轮胎和路面间附着极限的限制,车辆起步和加速过程中驱动力系数和滑转率的关系曲线与制动过程中附着系数和滑移率的关系是类似的。图3-5所示为分开表达的制动滑移率和驱动滑转率曲线。

图3-5 制动滑移率和驱动滑转率曲线
μ T —驱动力系数 μ b —制动力系数 μ s —侧向力系数
λ T —驱动滑转率 λ —制动滑移率
①—驱动力系数曲线 ②—侧向力系数曲线 ③—制动力系数曲线
3.2.3 轮胎摩擦圆
在车辆运动过程中,轮胎会受到地面传递的力和力矩,力包括纵向力和横向力,两者的合力就地面对轮胎的作用力。
图3-6所示的轮胎摩擦圆是轮胎所受纵向力与侧向力的关系示意图,地面对轮胎的作用力受轮胎状态与地面条件的物理极限限制,并受载荷影响,当二者合力超出地面的物理极限时,地面对轮胎的作用力将无法继续增大,车辆将无法保持其运动方向及稳定性。
在车辆制动时,制动力增大,从而侧向力减小,车辆的转向性和稳定性降低,在没有装备ABS系统的车上,制动力增大到车轮抱死拖滑时车轮失去侧向力,因此车辆失去转向性能。当车辆处于加速或者减速工况时,由于前、后轴荷转移的作用,前、后轮对轮胎卡姆圆的利用率也不同。
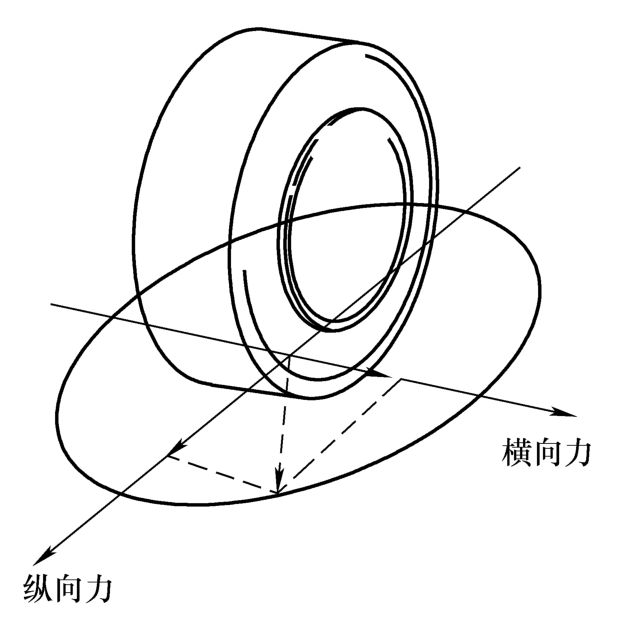
图3-6 轮胎摩擦圆
3.2.4 不足转向和过度转向特性
车辆所受的侧向力是由地面和轮胎之间产生侧偏并形成侧偏角产生的。当车辆处于不足转向工况时,车辆的横向加速度增大,前轮侧偏角的增加大于后轮侧偏角;而在过度转向时,后轮侧偏角的增加大于前轮侧偏角(图3-7)。
从车辆的操控安全性方面考虑,轻微的不足转向到中性转向对车辆是有利的。根据轮胎摩擦圆的理论可以得出,通过对车轮滑移率进行控制,调节车辆所受到的地面横向力,可达到使车辆在不足转向和过度转向之间切换的目的。
车辆的离心力产生在车辆的重心处(图3-8),当车辆的离心力超出车辆轮胎与地面之间的最大侧向力时,车辆无法继续保持预定的行驶轨迹,处于危险状态。当前轮先发生侧滑时,车辆进入不足转向状态;当后轮先发生侧滑时,车辆进入过度转向状态。当ESP系统在不足转向或者过度转向工况下识别到不期望的横向运动时,通过主动对车轮施加制动力使车辆重新回到稳定状态。
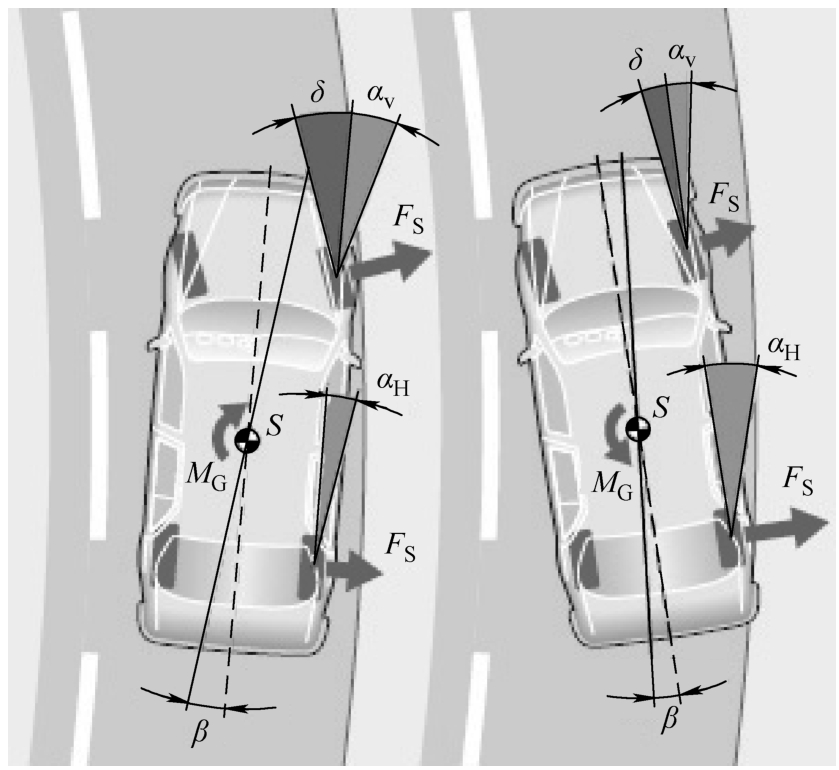
图3-7 车辆的不足转向和过度转向
δ —转向角 α v —前侧偏角 α H —后侧偏角
β —侧偏角 F S —侧向力 M G —横摆力矩 S —重心
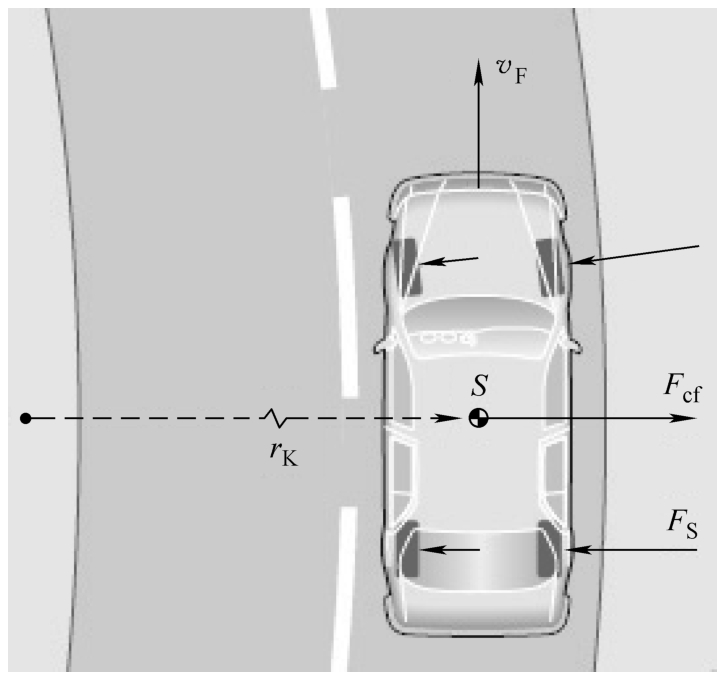
图3-8 车辆在弯道时的离心力
F S —侧向力 F cf —离心力 v F —车速
r K —转弯半径 S —重心