2.2 典型ABB工业机器人MDH参数
ABB工业机器人采用MDH参数。
在安装有RobotStudio软件的计算机上,可以通过如下方法获取ABB工业机器人的MDH参数。
(1)打开RobotStudio软件,单击“基本”—“导入模型库”—“浏览库文件…”,如图2-6所示。
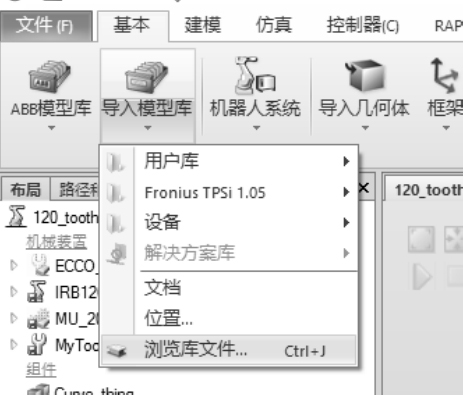
图2-6 选择“浏览库文件”
(2)在图2-7中,选择“RobotStudio 6.08.01”下的“ABB Library”,单击右侧的Robots文件夹,该文件夹内的内容为ABB工业机器人的模型库。
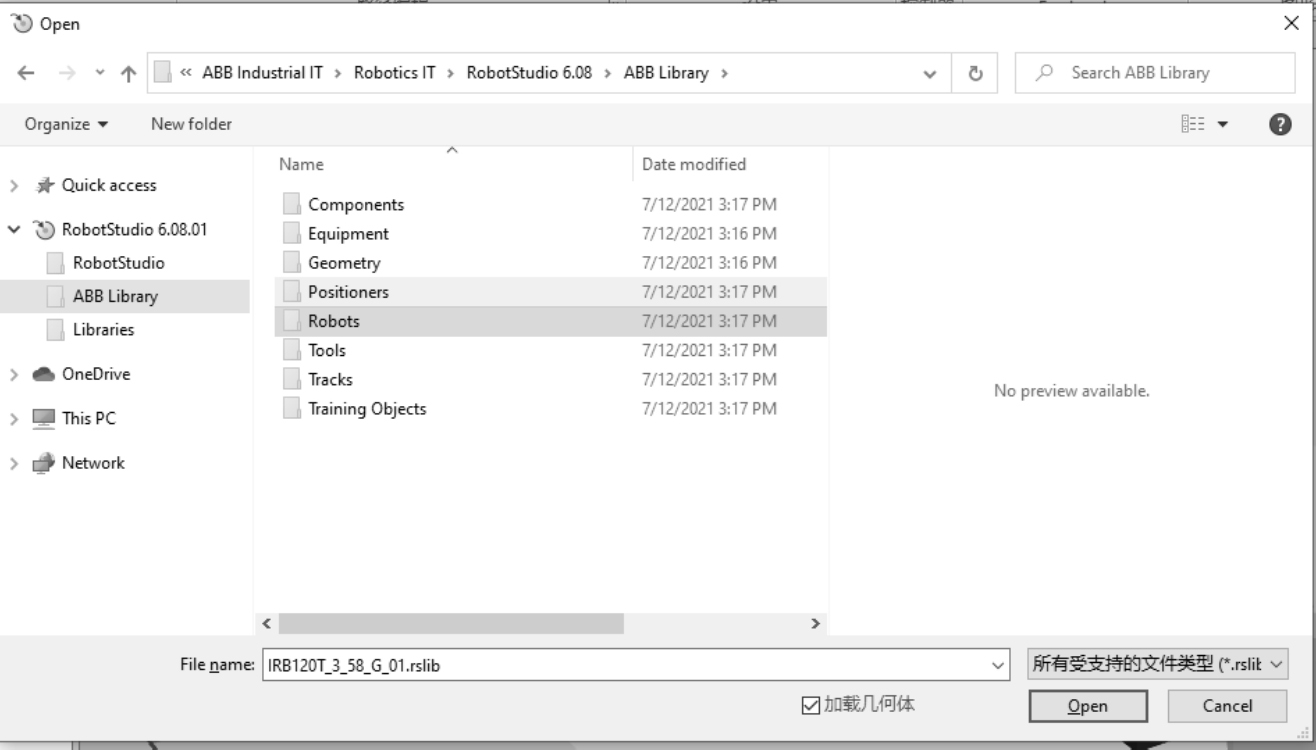
图2-7 打开Robots文件夹
(3)将需要的机器人模型文件复制到个人文件夹下(见图2-8)。
(4)将步骤(3)复制的文件后缀名修改为.zip,并解压,如图2-9所示。双击PIM.xml文件,打开PIM.xml文件。
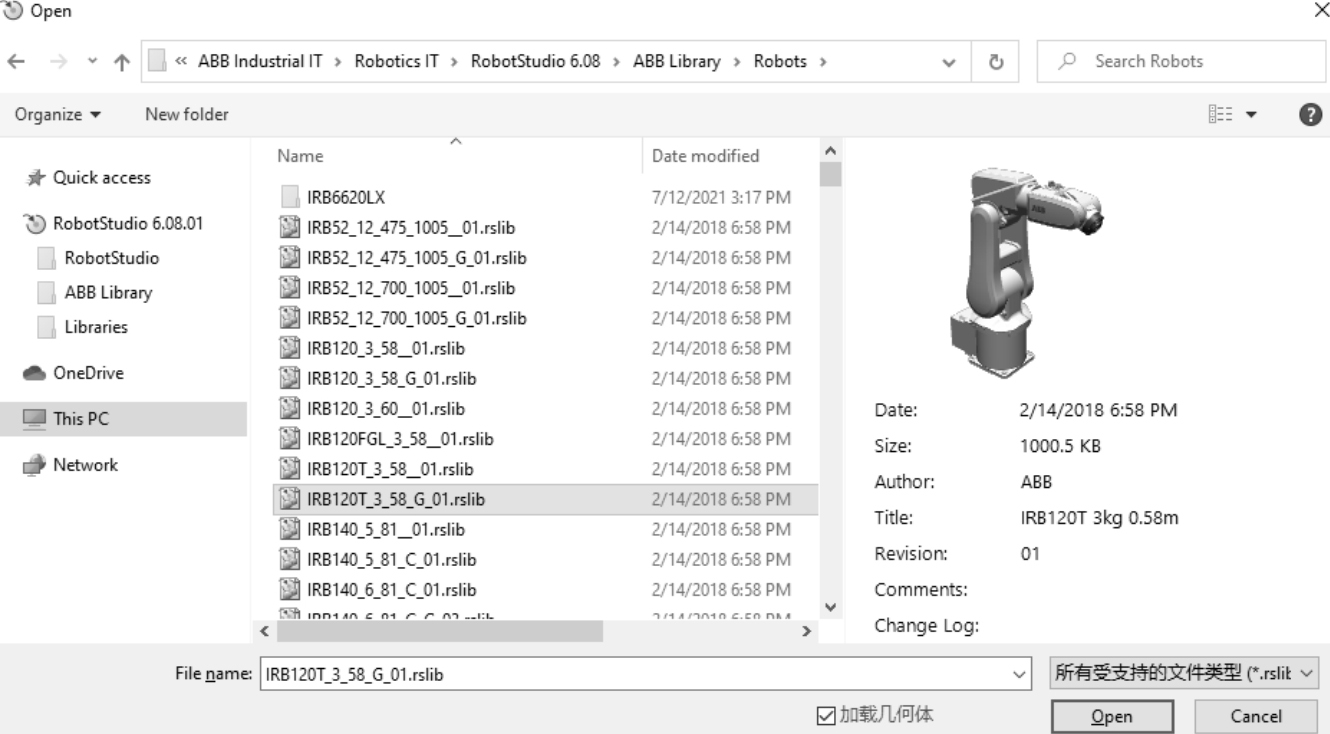
图2-8 将需要的机器人模型文件复制到个人文件夹下
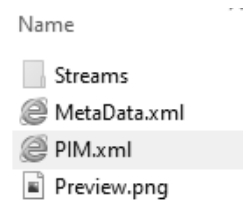
图2-9 解压得到PIM.xml文件
(5)“ForwardKinematicsDH”节点下的参数即为MDH参数。也可搜索“DHParameters”关键字,即可看到各关节的MDH参数,如图2-10所示。图2-10中的Twist为MDH中的 α ,Length为MDH中的 a ,Rotation为MDH中的θ,Offset为MDH中的 d 。
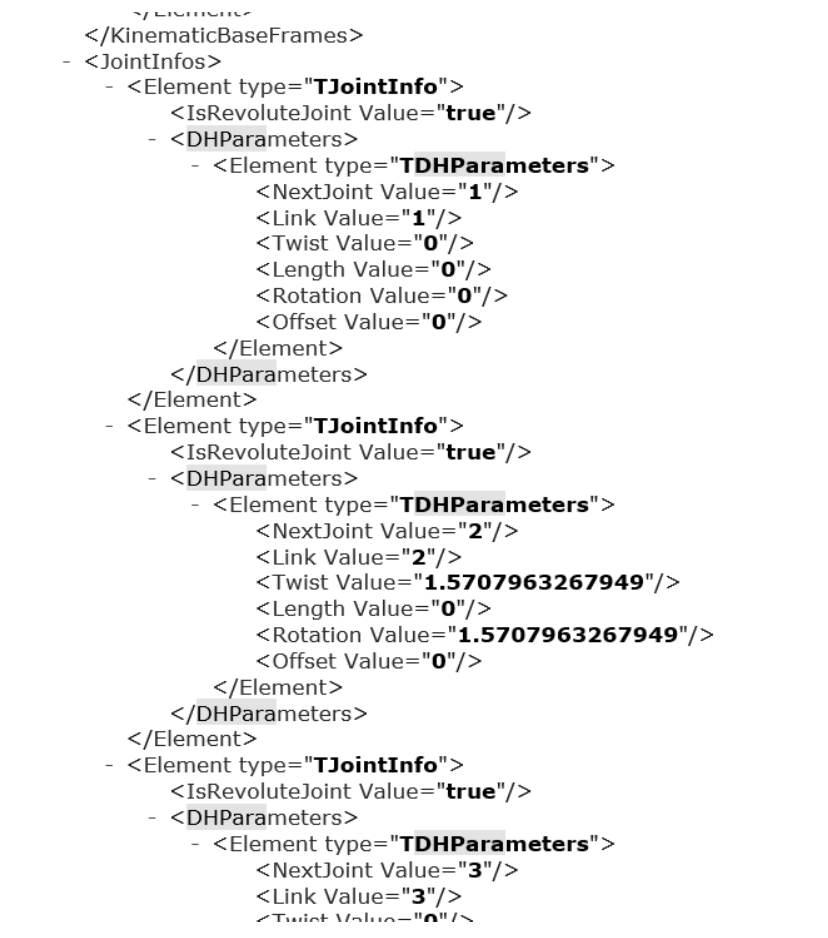
图2-10 IRB120机器人的部分MDH参数
(6)根据2.1节的介绍,坐标系{0}通常与坐标系{1}重合。坐标系{0}与机器人基坐标系(Base)还有一个转化关系(见图2-11),该转化关系可以从PIM.xml文件的KinematicBaseFrame中获得,如图2-12所示。
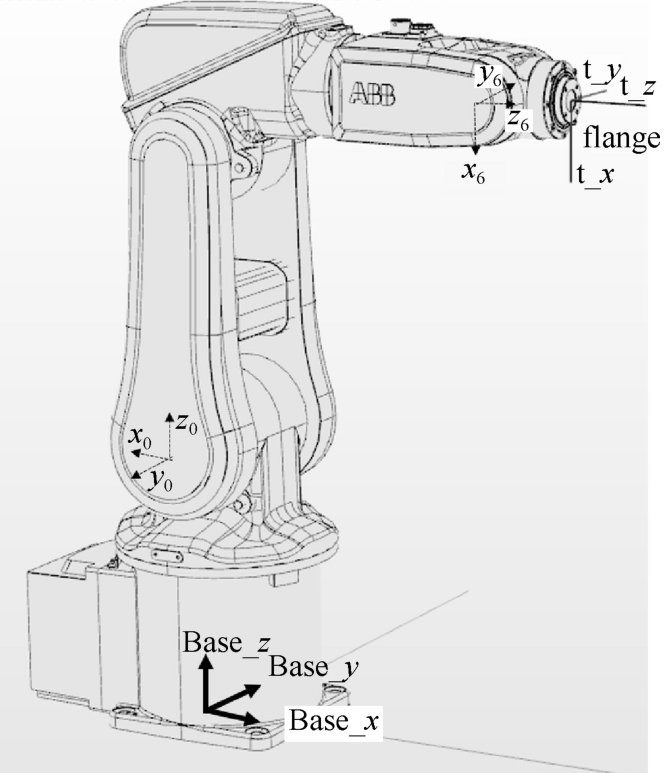
图2-11 机器人各轴的固连坐标系示意图

图2-12 PIM.xml文件
(7)由于MDH建模方法将固连坐标系建立在连杆首端。对于6轴关节机器人,坐标系{6}会在手腕处,如图2-11所示。手腕到法兰盘通常为沿着坐标系{6}的 z 轴的一个偏置,该值可以通过将图2-13中的机器人tool0位姿RowT中的“X value”加上图2-14中的Link6的CorrectionTransform的RowT的“Z value”得到。
为便于书写和整理,后文整理的MDH参数将机器人基坐标系到坐标系{0}(由于MDH的坐标系0通常与坐标系1重合)的转化放入坐标系{1}的参数内;将坐标系{6}到法兰盘的偏置放入坐标系{6}的参数 d 内(坐标系{6}直接平移到法兰盘)。
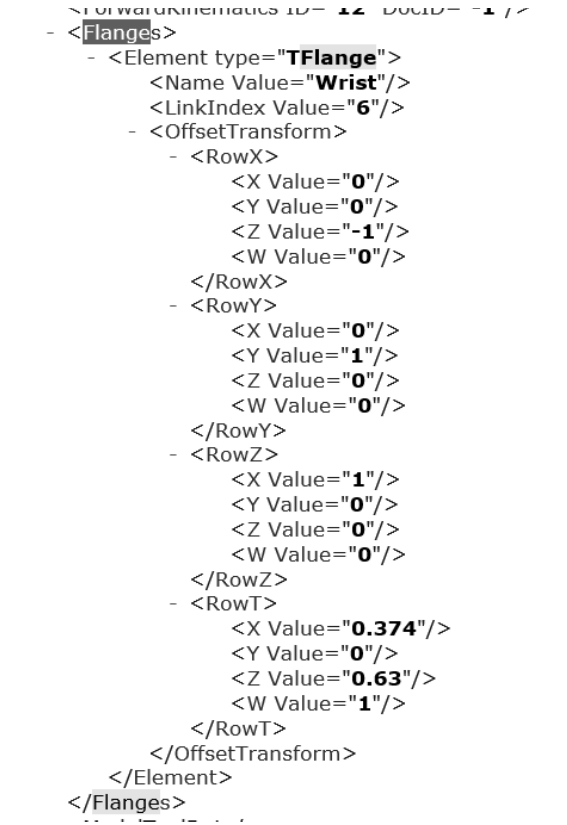
图2-13 机器人tool0位姿
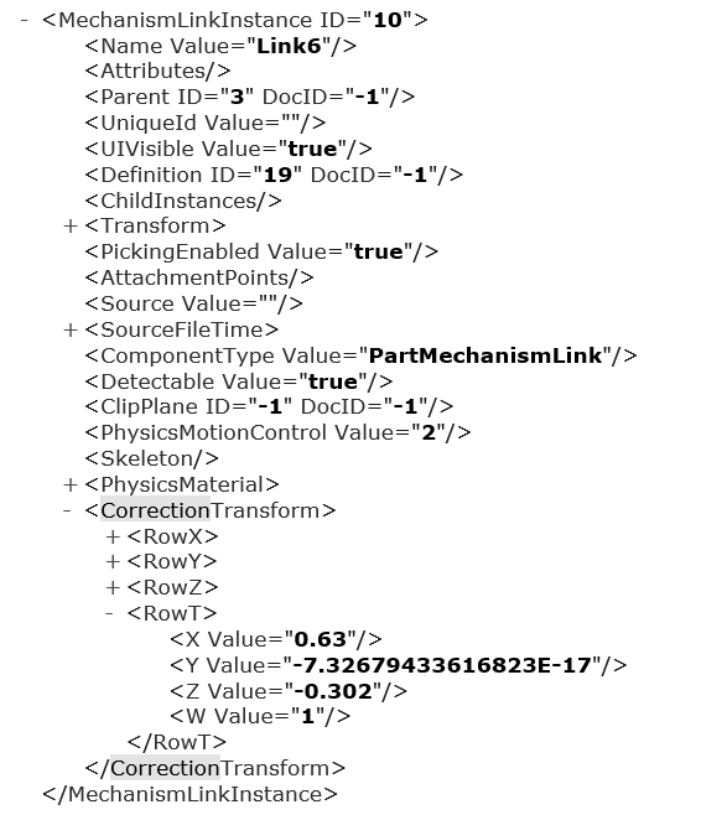
图2-14 Link6的CorrectionTransform
2.2.1 IRB120
根据以上内容,整理得到IRB120机器人(见图2-15)的MDH参数如表2-1所示,其各固连坐标系示意图如图2-16所示。
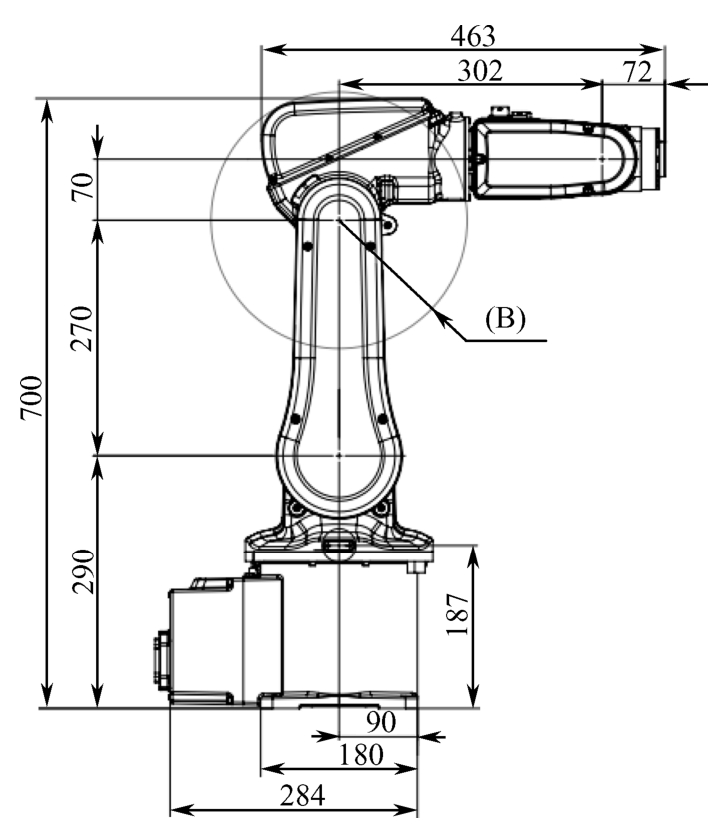
图2-15 IRB120机器人的外形尺寸图
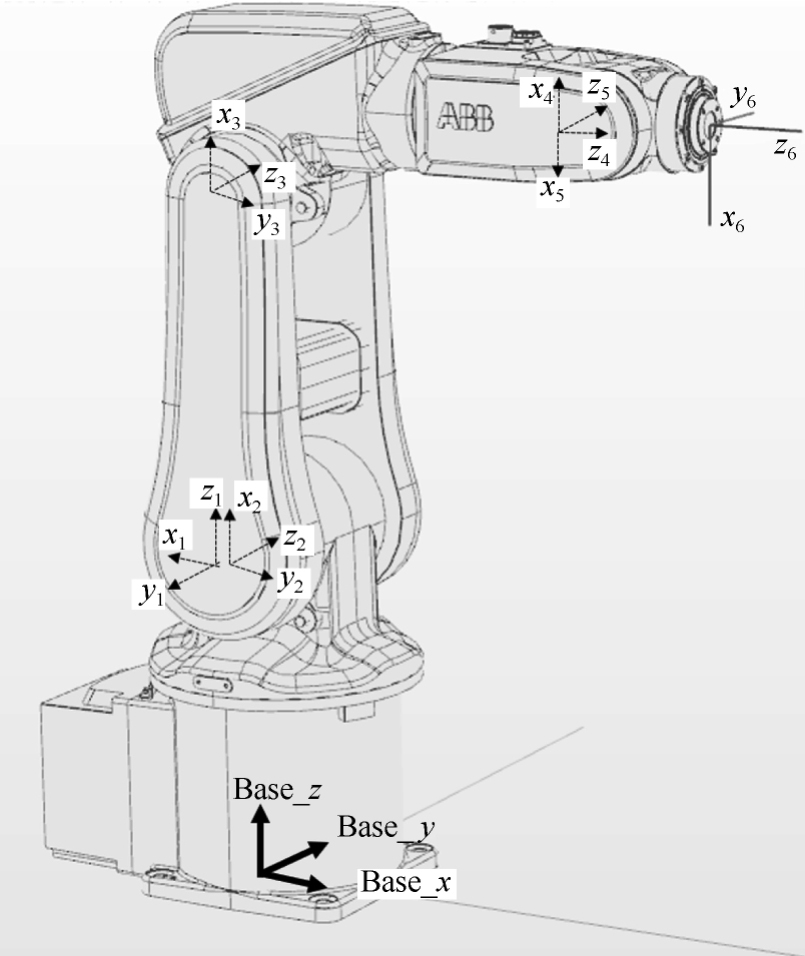
图2-16 IRB120机器人的各固连坐标系示意图
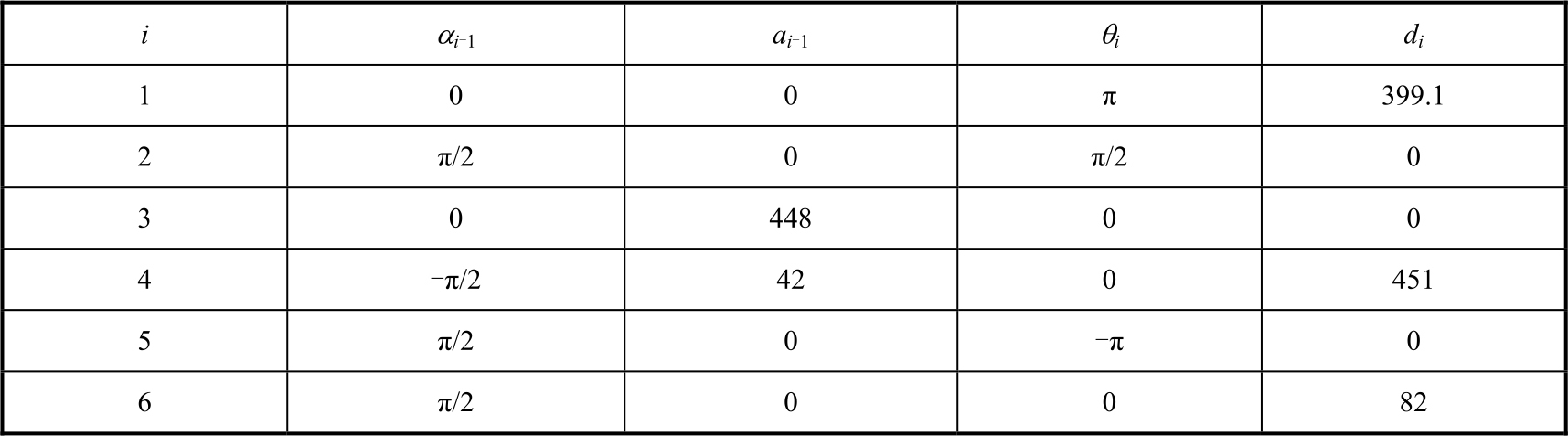
表2-1 IRB120机器人的MDH参数
2.2.2 IRB1200
IRB1200(见图2-17)的MDH参数如表2-2所示,其各固连坐标系示意图如图2-18所示。
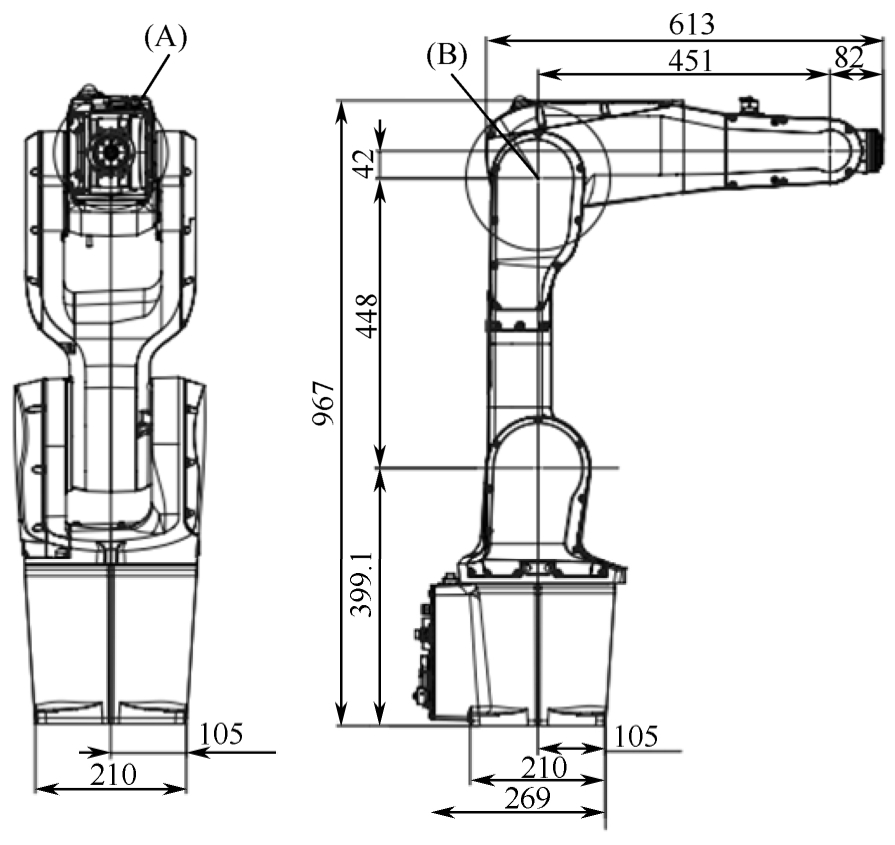
图2-17 IRB1200-7/0.7机器人的外形尺寸图

图2-18 IRB1200-7/0.7机器人的各固连坐标系示意图
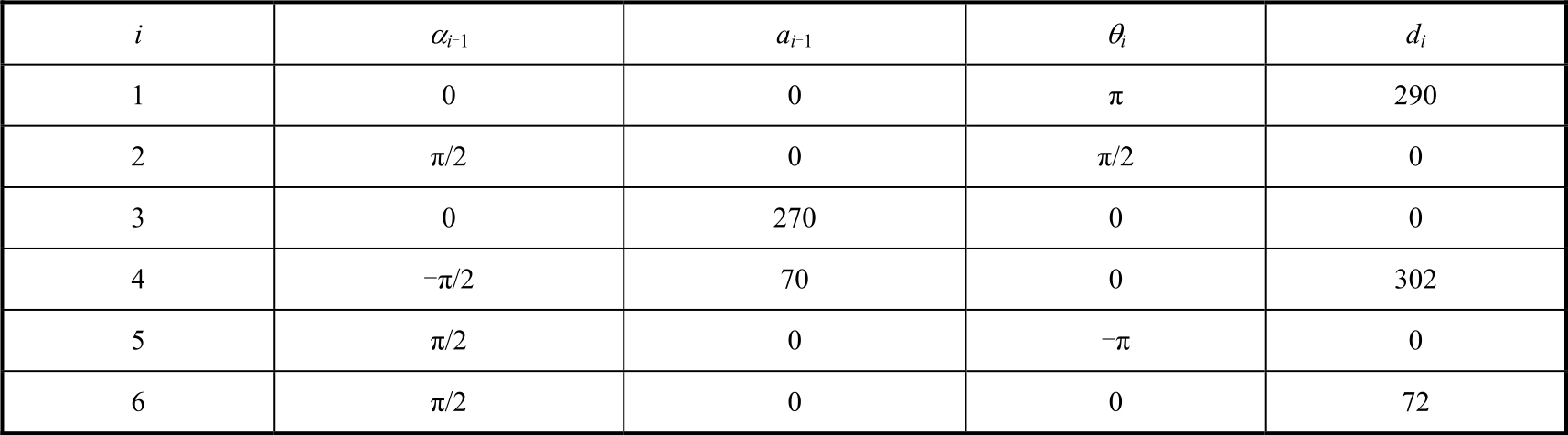
表2-2 IRB1200-7/0.7机器人的MDH参数
2.2.3 IRB1410
IRB1410机器人(见图2-19)的MDH参数如表2-3所示,其各固连坐标系示意图如图2-20所示。
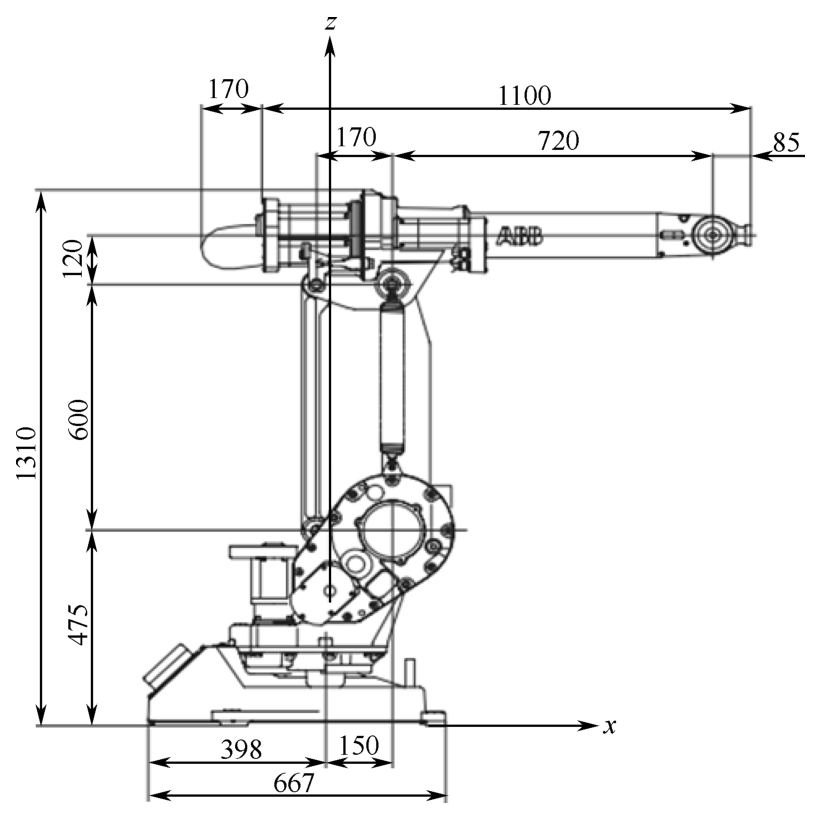
图2-19 IRB1410机器人的外形尺寸图
表2-3 IRB1410机器人的MDH参数
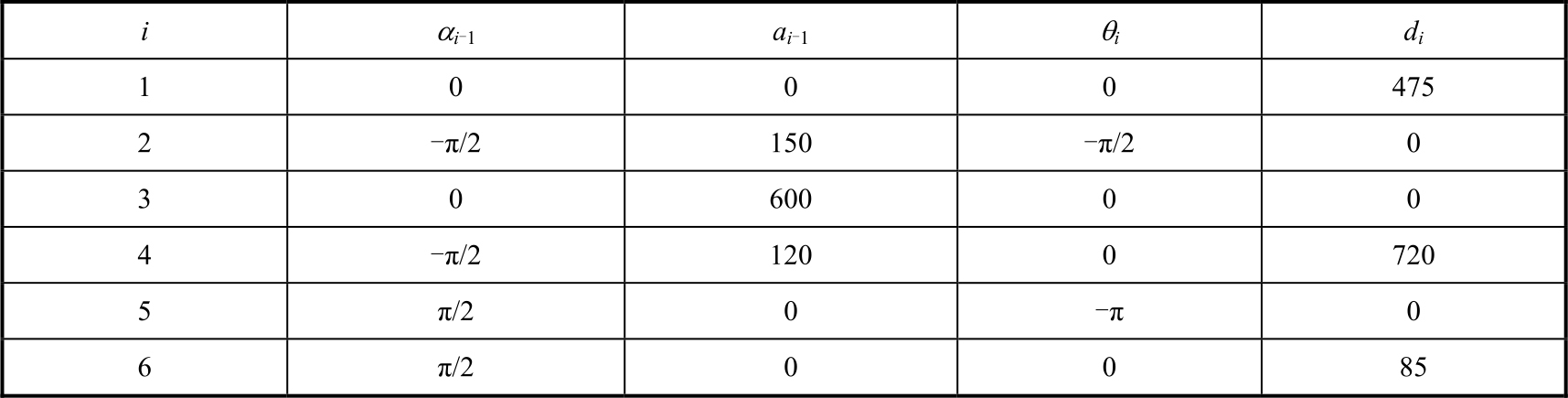
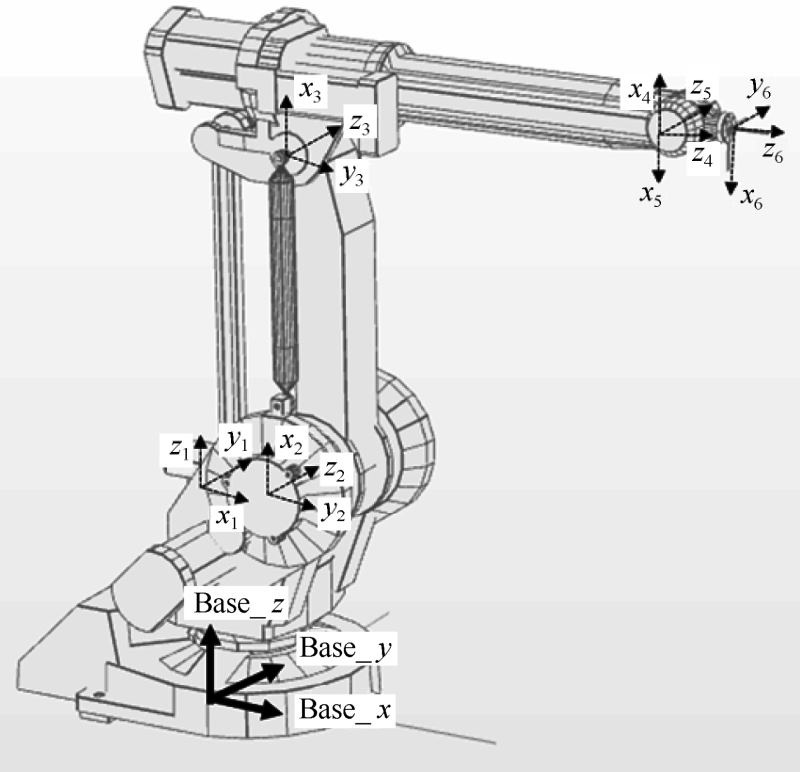
图2-20 IRB1410机器人的各固连坐标系示意图
2.2.4 IRB2600
IRB2600-20/1.65机器人(见图2-21)的MDH参数如表2-4所示,其各固连坐标系示意图如图2-22所示。
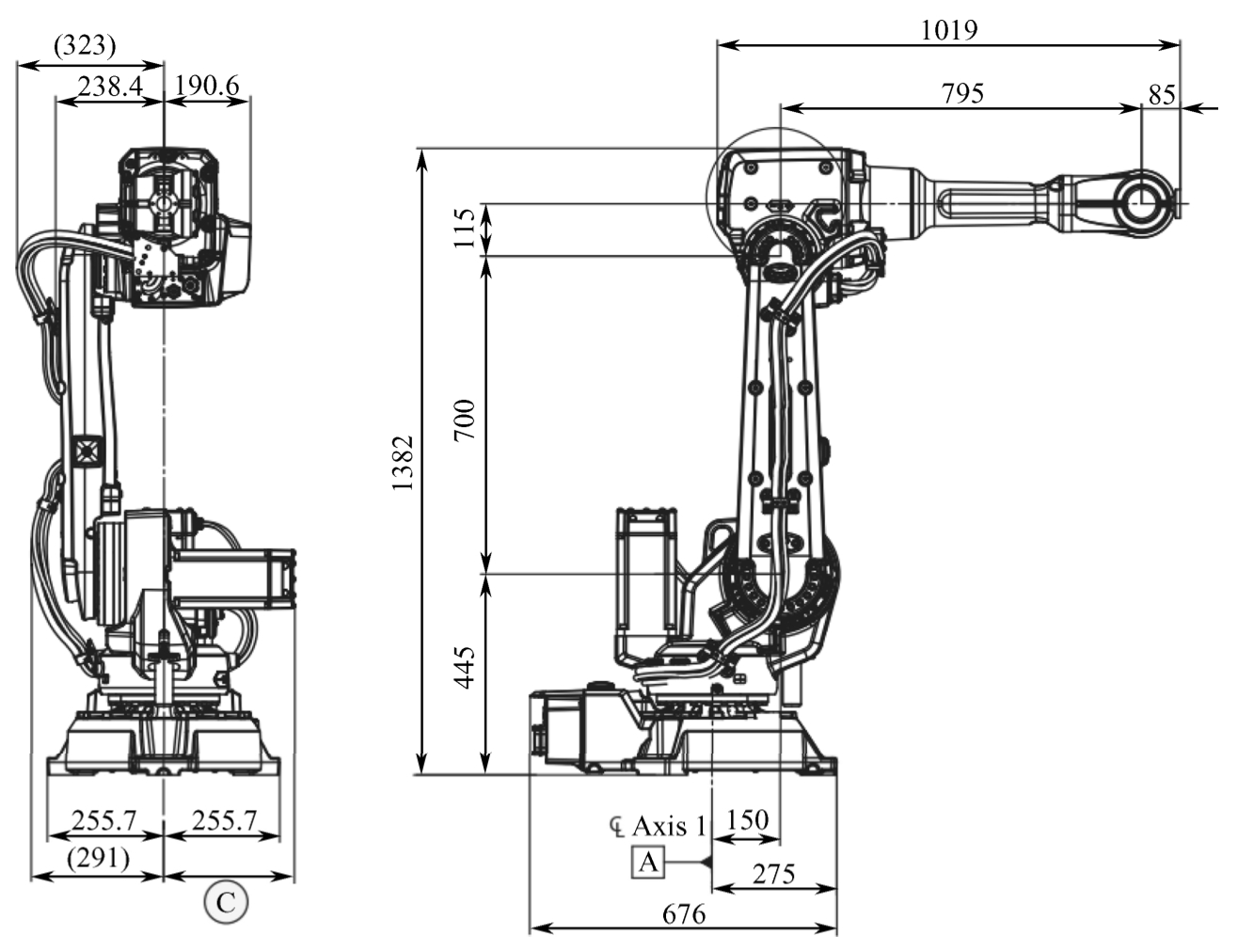
图2-21 IRB2600-20/1.65机器人的外形尺寸图
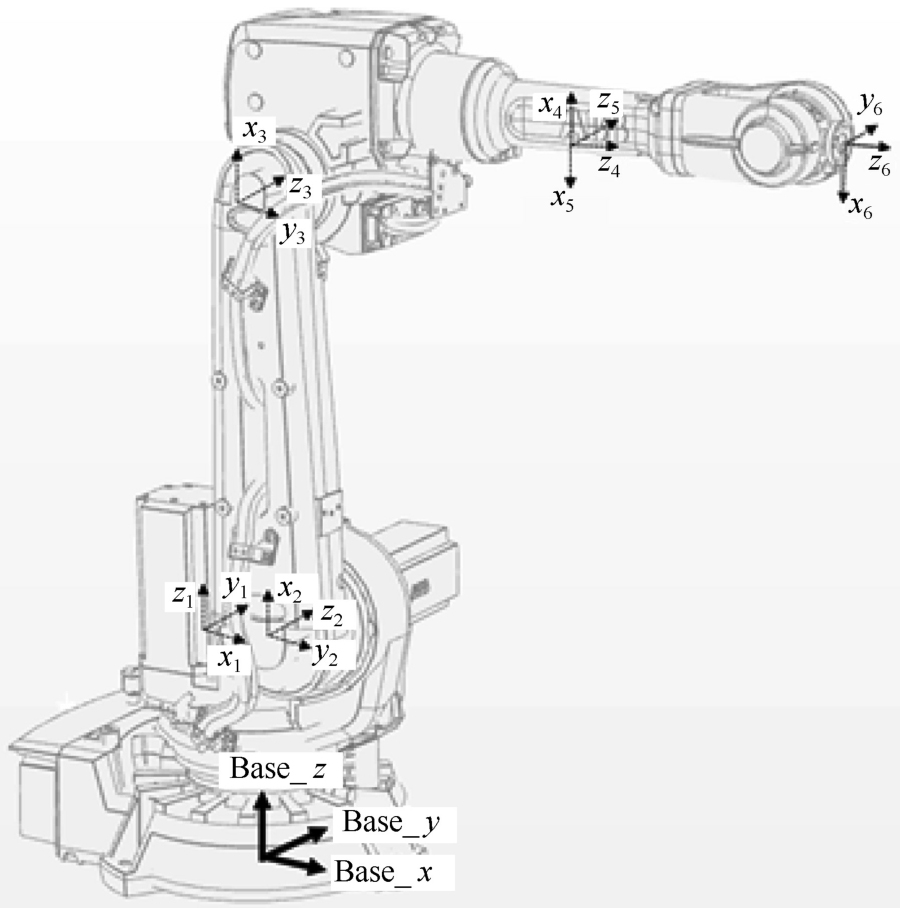
图2-22 IRB2600-20/1.65机器人的各固连坐标系示意图
表2-4 IRB2600-20/1.65机器人的MDH参数
2.2.5 IRB4600
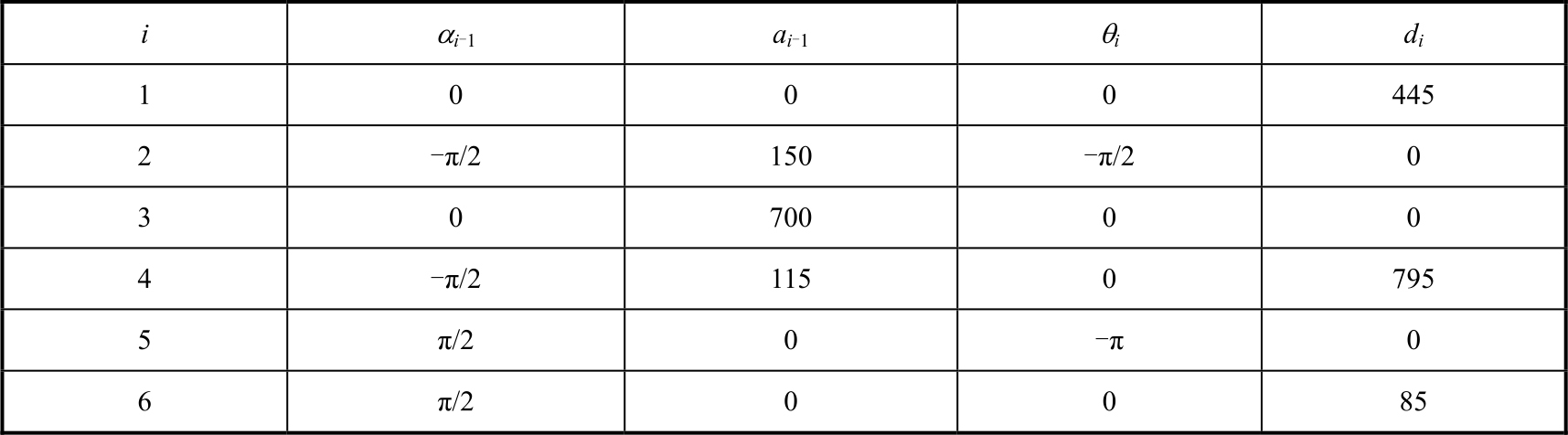
IRB4600-45/2.05机器人(见图2-23)的MDH参数如表2-5所示,其各固连坐标系示意图如图2-24所示。
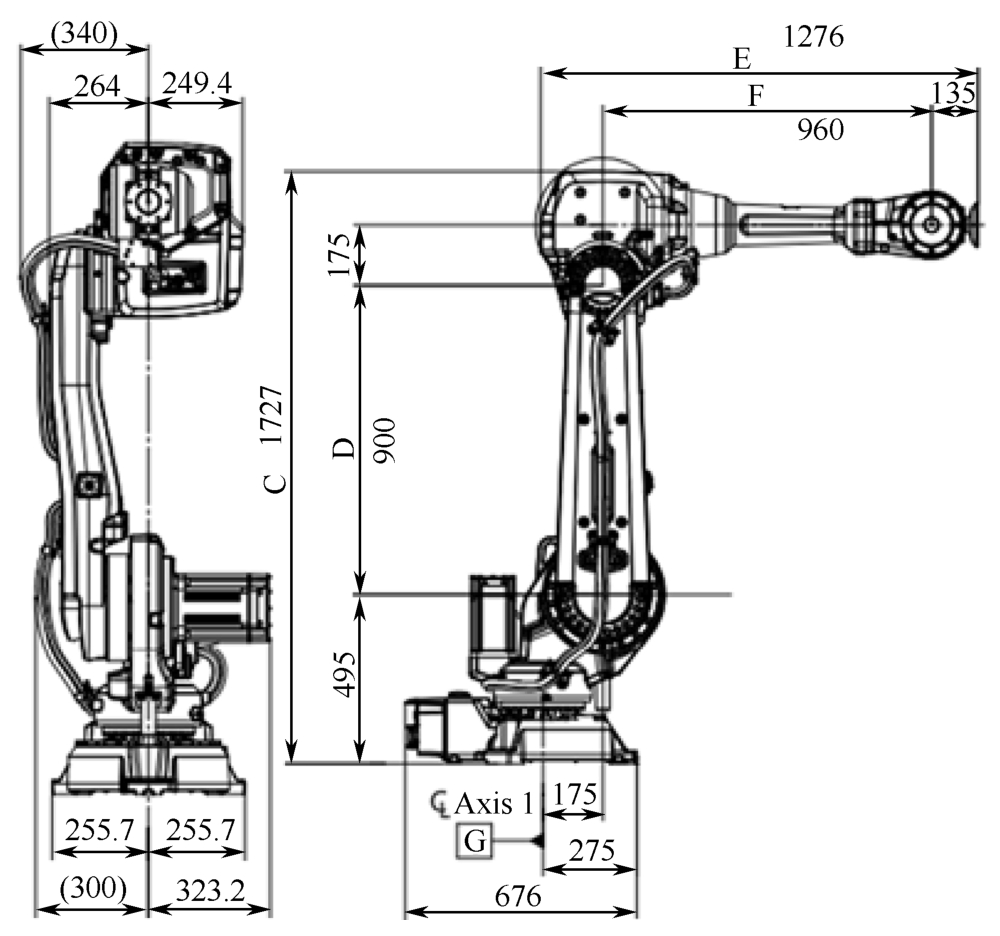
图2-23 IRB4600-45/2.05机器人的外形尺寸图
表2-5 IRB4600-45/2.05机器人的MDH参数
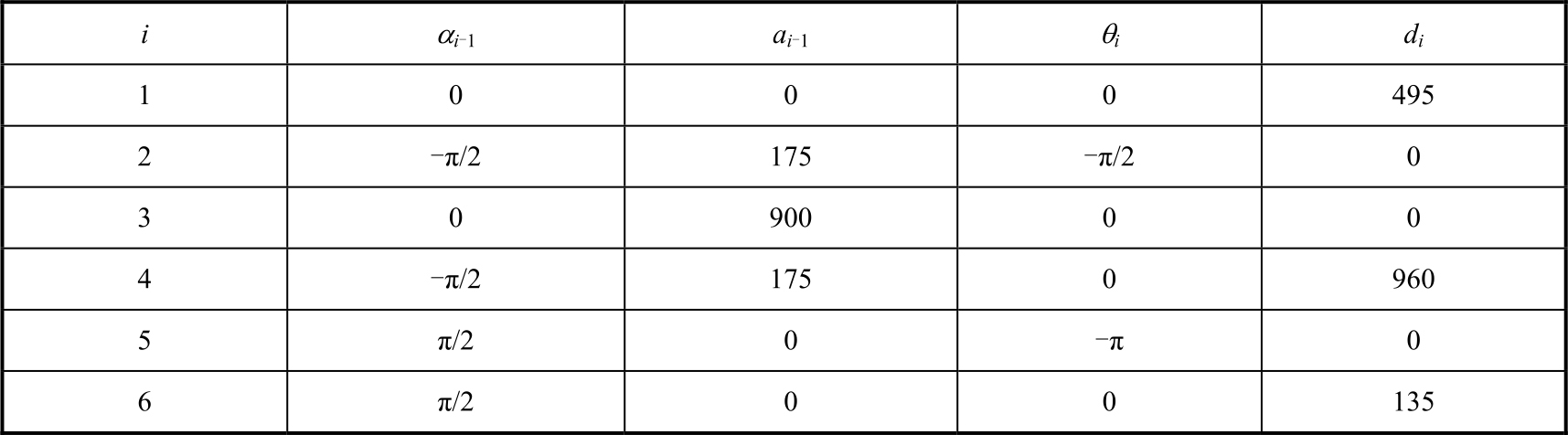
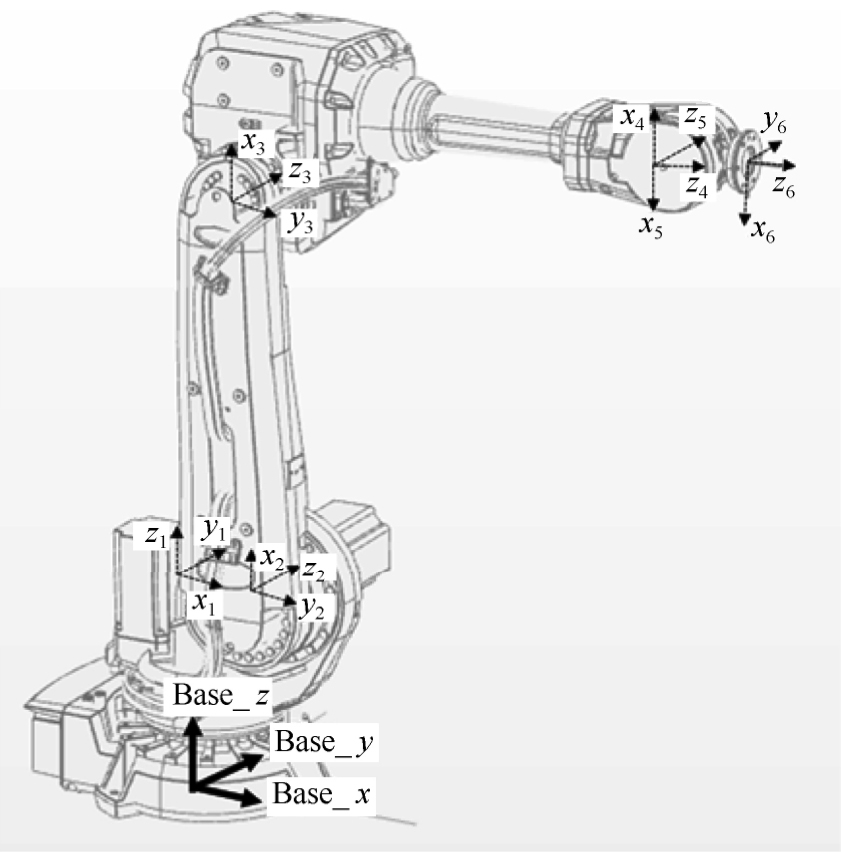
图2-24 IRB4600-45/2.05机器人的各固连坐标系示意图
2.2.6 IRB6700
IRB6700-200/2.6机器人(见图2-25和表2-6)的MDH参数如表2-7所示,其各固连坐标系示意图如图2-26所示。
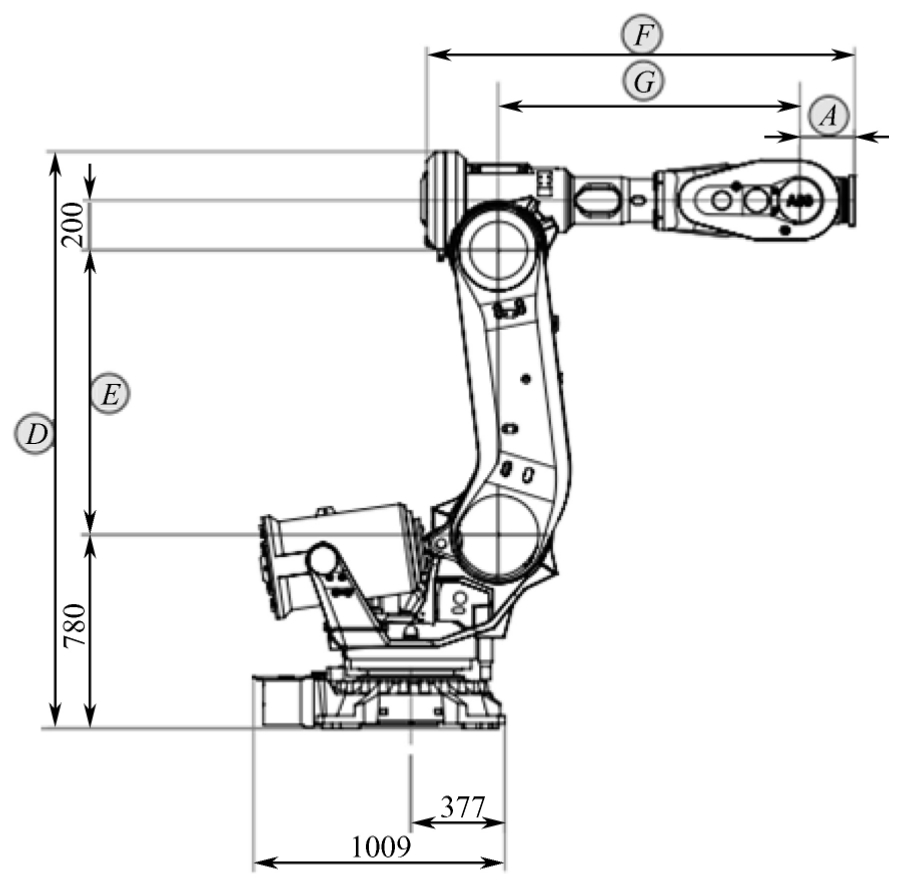
图2-25 IRB6700-200/2.6机器人的外形尺寸图
表2-6 IRB6700-200/2.6机器人的尺寸图数据

表2-7 IRB6700-200/2.6机器人的MDH参数
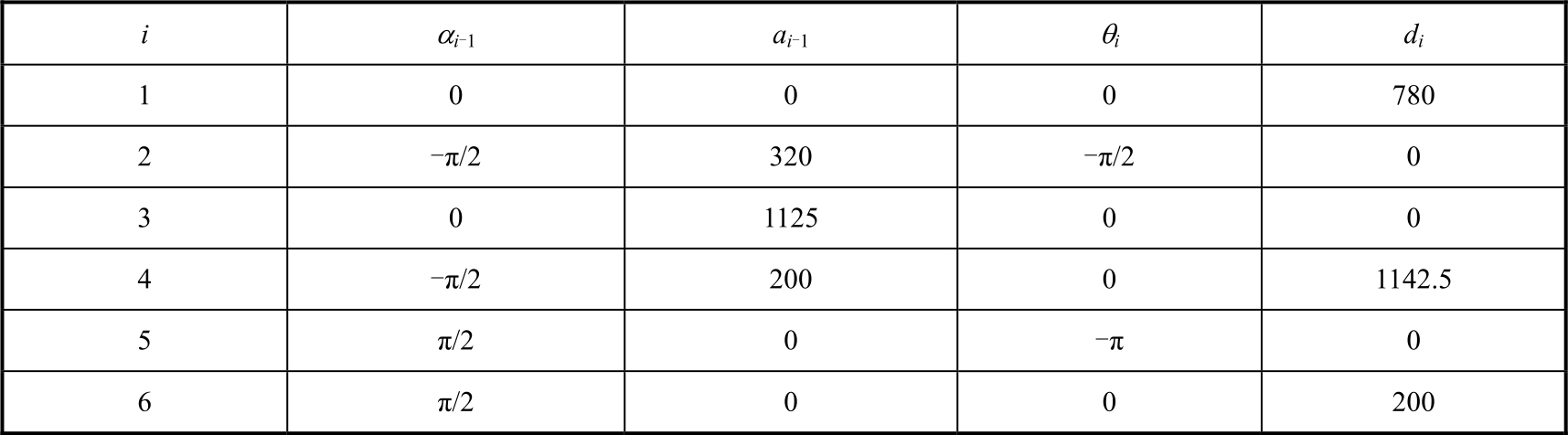
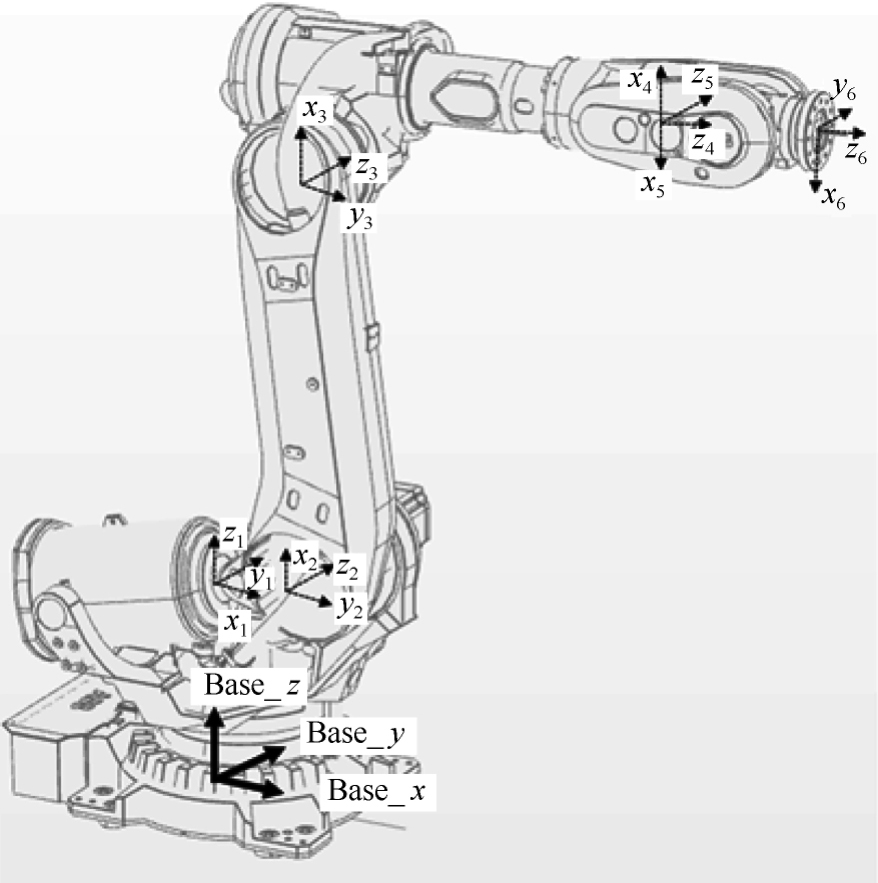
图2-26 IRB6700-200/2.6机器人的各固连坐标系示意图
2.2.7 YUMI
YUMI机器人为ABB工业机器人推出的双臂协作机器人(见图2-27),其每个机械臂都有7轴。

图2-27 ABB YUMI机器人
YUMI右手的KinematicBaseFrame位置关系如图2-28所示,其KinematicBaseFrame采用pose数据类型表示:
[[135.09,-106.775,461.995],[0.828884,0.314016,0.408008,0.218802]]
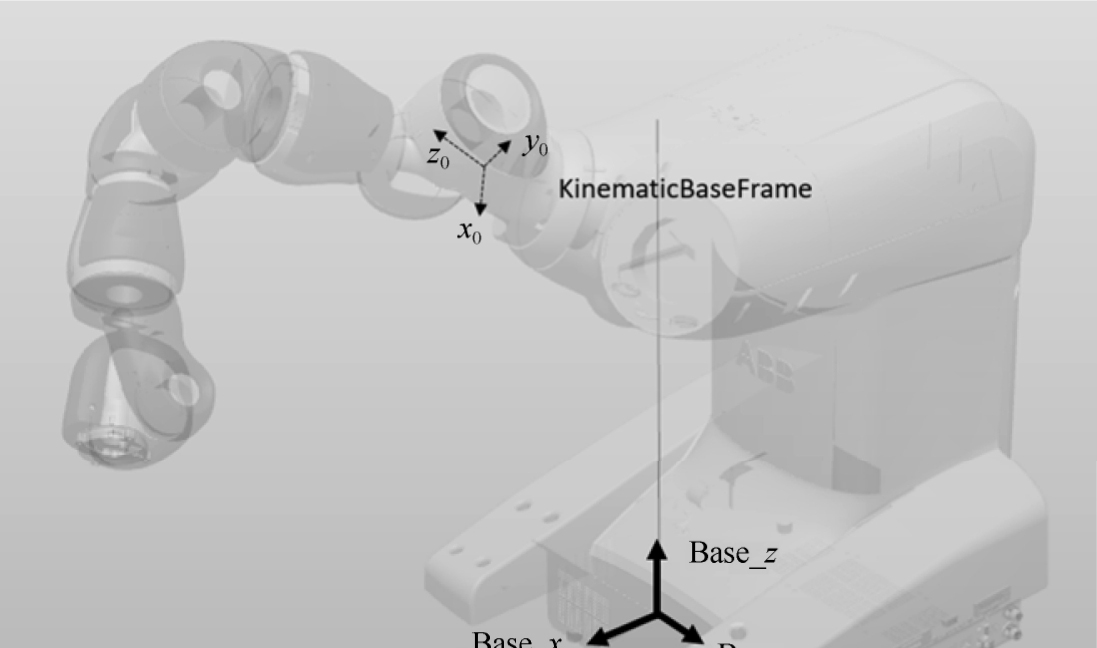
图2-28 YYUMI右手的KinematicBaseFrame位置关系
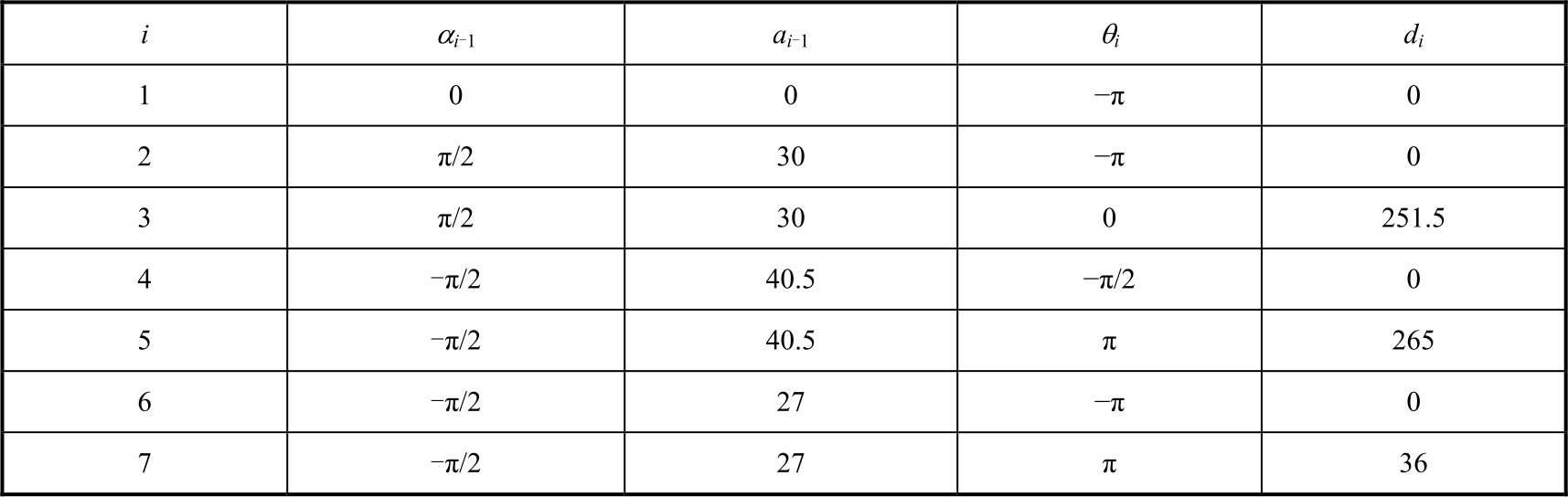
YUMI右手的MDH参数如表2-8所示。
表2-8 YUMI右手的MDH参数